Download
1 / 27
270 likes | 453 Views
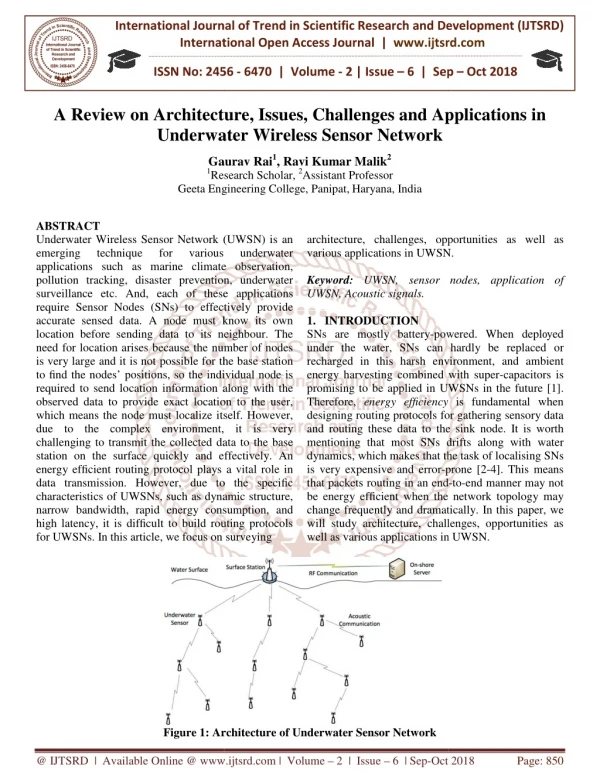
The Meandering Current Mobility Model and its Impact on Underwater Mobile Sensor Network. November 25, 2008 TaeSeob , Yun KAIST DATABASE & MULTIMEDIA LAB. Contents. Introduction Mobility Model Network Model Localization Conclusion. Introduction(1/4).

E N D
The Meandering Current Mobility Model and its Impact on Underwater Mobile Sensor Network November 25, 2008 TaeSeob ,Yun KAIST DATABASE & MULTIMEDIA LAB
Contents • Introduction • Mobility Model • Network Model • Localization • Conclusion DATABASE & MULTIMEDIA LAB
Introduction(1/4) • Needs for Underwater Environment Monitoring • Military surveillance • Oceanographic data collection • Ecology • Public safety • Industry DATABASE & MULTIMEDIA LAB
Introduction(2/4) • Features of Underwater Environment • Immense volume of the underwater domain • Impossible to use dense deployment • Meandering currents • Limitations of signal uses DATABASE & MULTIMEDIA LAB
Introduction(3/4) • Ways to Perform Measurements in the Oceans • Eulerian • Data is taken at positions that do not change in time • Lagrangian • Data is taken from autonomous devices that passively follow the ocean currents DATABASE & MULTIMEDIA LAB
Introduction(4/4) • Recent Work with Network Capability • Data gathering[Vas05] • Synchronization[Sye06] • Localization[Cha06] • Routing protocols[Pom05] [Xie06] • Energy minimization [Chi07] • MAC [Mak06] • This paper study • Underwater mobile acoustic sensor networks that consist of free floating sensors with network capability DATABASE & MULTIMEDIA LAB
Mobility Model(1/6) • Mobility Model • Description of the fluid nature of the medium in which interconnected sensors move • Typical mobile sensor network • Sensor move independently • Random walk process • Random waypoint process DATABASE & MULTIMEDIA LAB
Mobility Model(2/6) • Case of Fluids - the same velocity field advects all the sensors • Paths are deterministic • Strong correlations between nearby sensors • Ocean forecasts • Depends on the level of realism • Atmospheric forcing • Bottom topography • Boundary conditions DATABASE & MULTIMEDIA LAB
Mobility Model(3/6) • Lagrangian transport [Ott89][Sam06] • Stratified movement • Rotating fluid • Drifter- a buoyant object floating near the surface • Ignore vertical movements • Wind-driven upwelling/downwelling • Exceptionally intense internal waves DATABASE & MULTIMEDIA LAB
Mobility Model(4/6) • k = number of meanders in the unit length • c: phase speed with which they shift downstream • B: modulates the width of the meanders • A: average meander width • e: amplitude of the modulation • ω: frequency of e • (A = 1.2, c = 0.12, k = 2π/7.5, ω = 0.4, e= 0.3) DATABASE & MULTIMEDIA LAB
Mobility Model(5/6) DATABASE & MULTIMEDIA LAB
Mobility Model(6/6) DATABASE & MULTIMEDIA LAB
Network Model(1/9) • Time varying graph • G = (V(t), E(t)) • V(t): sensor nodes moving in a rectangular domain at time t • E(t): communication link between sensors • Communication link: if a node can send a packet to another node DATABASE & MULTIMEDIA LAB
Network Model(2/9) • Successful reception of a transmission depends on • Received signal strength • Interference caused by simultaneously transmitting nodes • Ambient noise level • Particularly affect acoustic underwater communication • Shadowing • Reflection • Scattering • diffraction DATABASE & MULTIMEDIA LAB
Network Model(3/9) • Homogeneous sensor network • Maximum communication range (Rc=1000m) • Deployment • Domain: initially, deploy in the square [0,4]x[-2,2]km to [0,80]x[-4,4]km • Scenarios • Single deployment • k-phase deployments DATABASE & MULTIMEDIA LAB
Network Model(4/9) • LCC(Largest Connected Component) • LCC(t) is the set of sensors in the largest connected component at time t • Disruption and delay tolerant networking(DTN)can be used to overcome [Fal03] • Probability that communication graph G is partitioned in several connected components • Communications require multiple hops DATABASE & MULTIMEDIA LAB
Network Model(5/9) DATABASE & MULTIMEDIA LAB
Network Model(6/9) DATABASE & MULTIMEDIA LAB
Network Model(7/9) • Coverage • Area Coverage • The area coverage of a sensor network at time t, fa(t) is the fraction of the geographical area covered by one or more sensors at time t • Area Coverage over a time-interval • The area coverage of a mobile sensor network during the time interval [0,t), fm(t) is the fraction of the geographical area covered by at least one sensor at some point of time within [0,t) DATABASE & MULTIMEDIA LAB
Network Model(8/9) DATABASE & MULTIMEDIA LAB
Network Model(9/9) DATABASE & MULTIMEDIA LAB
Localization(1/3) • Most underwater sensor network applications require location information for data tagging • Cannot use GPS because the high frequency signal does not propagate well through water DATABASE & MULTIMEDIA LAB
Localization(2/3) • Use a set of initial beacons [Ero07] • Sound sources • Special devices placed in the ocean emitting signals • Dive and Rise • The nodes have the ability to move vertically, get the GPS coordinates and distribute • Localization Process • A beacon distributes its coordinates to its neighbors • Estimates coordinates by signals from 3 beacons • Assume that z coordinate to be calculated by a pressure sensor • Metric: Time of Arrival(ToA) DATABASE & MULTIMEDIA LAB
Localization(3/3) DATABASE & MULTIMEDIA LAB
Conclusion • Contribution • First physically-inspired mobility model • Analysis of mobile underwater sensor networks • Could be exploited in the design of underwater sensor networks DATABASE & MULTIMEDIA LAB
References • [Vas05] I. Vasilescu, K. Kotay, D. Rus, M. Dunbabin, and P. Corke, “Data collection, storage, and retrieval with an underwater sensor network,” in SenSys’05, San Diego, California, USA, 2005, pp. 154–165. • [Sye06] A. Syed and J. Heidemann, “Time synchronization for high latency acoustic networks,” in Proc. of Infocom, Barcelona, Spain, April 2006, pp. 1–12. • [Cha06] V. Chandrasekhar, W. K. Seah, Y. S. Choo, and H. V. Ee, “Localization in underwater sensor networks: survey and challenges,” in WUWNet ’06, Los Angeles, CA, USA, 2006, pp. 33–40. • [Pom05] D. Pompili and T. Melodia, “Three-dimensional routing in underwater acoustic sensor networks,” in PE-WASUN ’05: Proc. of the 2nd ACM Int. workshop on Performance evaluation of wireless ad hoc, sensor, and ubiquitous networks, Montreal, Quebec, Canada, 2005, pp. 214–221. • [Xie06] P. Xie, J. Cui, and L. Lao, “Vbf: Vector-based forwarding protocol for underwater sensor networks,” in In Proc. of IFIP Networking’06, Portugual, May 2006, pp. 1216–1221. • [Chi07] N. Chirdchoo, W.-S. Soh, and K. C. Chua, “Aloha-based mac protocols with collision avoidance for underwater acoustic networks,” in INFOCOM 2007, Anchorage, Alaska, USA, May 2007, pp. 2271–2275. • [Mak06] D. Makhija, P. Kumaraswamy, and R. Roy, “Challenges and design of mac protocol for underwater acoustic sensor networks,” in 4th International Symposium on Modeling and Optimization in Mobile, Ad Hoc and Wireless Networks, Boston, Massachusetts, USA, 03-06 April 2006, pp. 1–6. DATABASE & MULTIMEDIA LAB
References • [Ott89] J. M. Ottino, The Kinematics of Mixing: Stretching, Chaos, and Transport, ser. Cambridge Texts in Applied Mathematics. Cambridge University Press, 1989, no. 3. • [Sam06] R. M. Samelson and S. Wiggins, Lagrangian Transport in Geophysical Jets and Waves. The Dynamical Systems Approach, ser. Interdisciplinary Applied Mathematics. Springer-Verlag, 2006, no. 31 • [Fal03] K. Fall, “A delay-tolerant network architecture for challenged internets,” in SIGCOMM ’03, Karlsruhe, Germany, 2003, pp. 27–34. • [Ero07] M. Erol, L. Vieira, and M. Gerla, “Localization with divenrise (dnr) beacons for underwater sensor networks,” in to be presented in WUWnet’07, 2007 DATABASE & MULTIMEDIA LAB