Download
1 / 5
50 likes | 149 Views
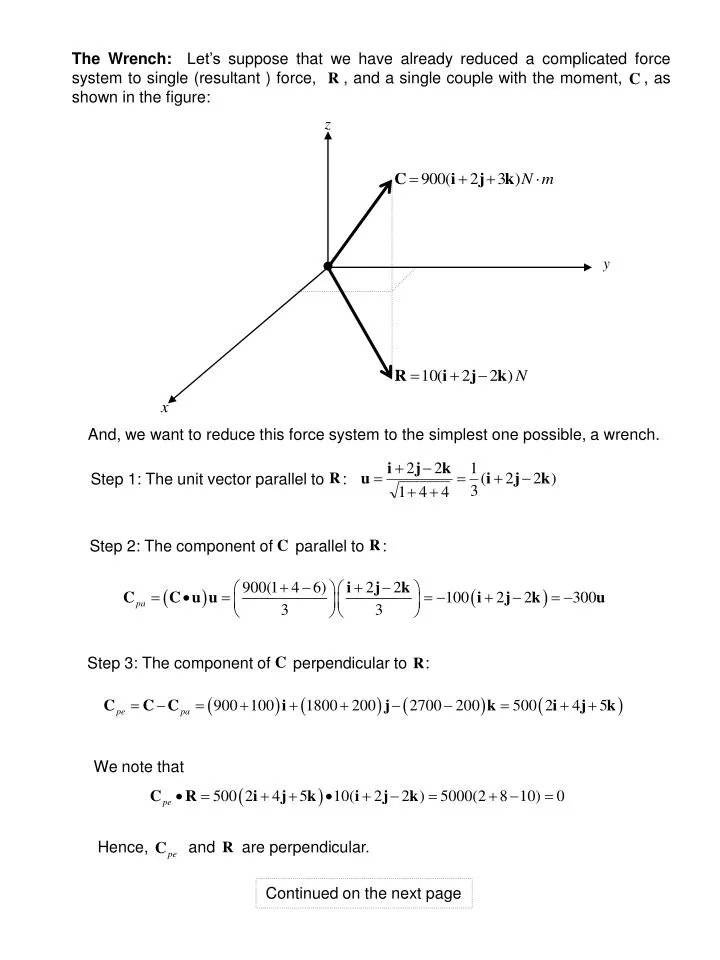
The Wrench: Let’s suppose that we have already reduced a complicated force system to single (resultant ) force, , and a single couple with the moment, , as shown in the figure:. And, we want to reduce this force system to the simplest one possible, a wrench.

E N D
The Wrench: Let’s suppose that we have already reduced a complicated force system to single (resultant ) force, , and a single couple with the moment, , as shown in the figure: And, we want to reduce this force system to the simplest one possible, a wrench. Step 1: The unit vector parallel to : Step 2: The component of parallel to : Step 3: The component of perpendicular to : We note that Hence, and are perpendicular. Continued on the next page
The moment of the couple has been resolved into a perpendicular component, , and a parallel component, . Theses vector could shown anywhere in space because a couple produces the same moment about all points in space. Here they are shown at the origin to make it easier to see that they are perpendicular and parallel to . Continued on the next page
Step 4: in a new position, denoted by P, such that the new resultant moment of all the couples, , is given by: Because is perpendicular to both and , there is no way that can be ; we can only eliminate . We put couple P (x,y,z) A B Continued on the next page
We note that which indicates that there are not three independent equations. In fact, we see that the sum of the first two equations in B is equal to the third. As in the two-dimensional case, we have the equation of a straight line. To see which line, we arbitrarily put x = 0 and then find y = - 250 and z = 200. This is one point on the line. Then we arbitrarily put y = 0 and find x = 125 and z = - 50 to find another. The vector to the first point from the second is given by To show that this vector is parallel to , we note that . Now we have reduced the force system to a single force acting along the line defined by B (point P is on this line) and a couple with a moment parallel to the force. Such a force system is called a wrench. Because the moment is in the direction opposite to that of the force, the wrench is said to be negative. An Alternative Approach: We know that the final moment in the simplest force system is parallel to the resultant force, so we can go back to A and set the resultant moment equal to a vector parallel to the force: where M is the magnitude of the moment parallel to the force (unknown at this point) and u is the unit vector parallel to R. Recalling that we can arbitrarily assign a value to one of the coordinates, we can put x = 0, y = 0, z = 0 in the three equations above and obtain the following three sets of equations with three equations in each set:
We can solve these three sets of equations using, for example, MATLAB or MATHEMATICA: We note that . This solution agrees with the one obtained earlier. The solution for M is the same for all three arbitrary choices of the coordinates (indeed for all choices).