Download
1 / 21
210 likes | 401 Views
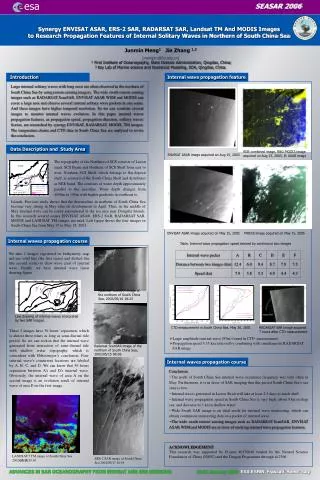
ICC 2007, Moscow - Russia. Road network simplification based on the algorithm of polarization transformation. Qian Haizhong 1,2 Meng Liqiu 1 Zhang Meng 1. 1 Technical University of Munich, Germany 2 Information Engineering University, China. 1. Background.

E N D
ICC 2007, Moscow - Russia Road network simplification based on the algorithm of polarization transformation Qian Haizhong1,2 Meng Liqiu1 Zhang Meng1 1 Technical University of Munich, Germany 2 Information Engineering University, China
1. Background • As a matter of fact, road network generalization is not • a new topic: • The GALBE algorithm (Mustière 1998) • AGENT-road (Duchêne, 2001) • EU-project AGENT (ESPRIT/LTR/24939, cf. Lamy et al 1999) • Multi-agent principles and a constraint-based approach (Ruas 1999) • CartoLEARN-road (Mustière 2001) • Principles of ‘continuation’ and ‘stroke’ (Field, Hayers and Hess, 1993) • Generalization of both ‘rural’ and ‘urban’ roads (Similarly, Chaudhry & Mackaness , 2005)
1. Background A lot of problems still remain in network generalization. The most important requirements concerned with global characteristic structure, local characteristic structure and relative network density have been seldom addressed.
2. Key Technique A key technique involved in our new approach is termed as polarization transformation (PT). By means of PT a two-dimensional network can be converted into a one-dimensional spectrum line without losing any information. Thus it allows a more straightforward cluster analysis and simplification to be conducted in a simpler space, i.e. the spectrum line.
3. Generalisation based on PT Step 1: Represent the road element by its centre point. In this way, the road network will be expressed by a point cluster. centre point Representing the road objects with its centre point
3. Generalisation based on PT Angle Point symbol Angle Distance r Step 2: One of the central points in this cluster will be confirmed as the origin of the polar coordinate system. Then each of the point symbols, which represent one road element, can be described by a polar coordinate pair (ai, ri) Polar coordinates of scattered points
3. Generalisation based on PT Step 3: The polarized point set is sequenced by the relative polar angle ranging from 0°to 360°. By plotting the sequence on an XY-plane, viz. polarization space, a spectrum line is formed. distance (m) Angle (degree) The Spectrum line in the polarization space
3. Generalisation based on PT Step 4: By the analysis of polar angles, the spectrum line can be partitioned into several segments. 180 150 120 90 60 30 Distance (m) Angle (degree) Segmented spectrum line
3. Generalisation based on PT 1) The node with the maximum polar radius 2) The node with the minimum polar radius 3) The first and the end node of the segment 4) The nodes that satisfy the condition ‘relative maximum or relative minimum ’, i.e. and . Step 5: The nodes in each spectrum line segment are classified into two groups, characteristic nodes and non-characteristic nodes. The characteristic nodes include: Characteristic points Other points
3. Generalisation based on PT Step 6: Dealing with characteristic nodes If a node of spectrum line can be deleted, the node is called “Can be Deleted Point (CDP)”, otherwise it is called “Can not be Deleted Point (CNDP)”. The confirmed characteristic nodes should be regarded as CNDP.
3. Generalisation based on PT Step 7: Dealing with non-characteristic nodes For point , if it is the start or end node of a segment of spectrum line, it must be preserved, otherwise it has two neighbor points of and . Then:
3. Generalisation based on PT (1) Drawing a circle with as its center and l as radius, comparing the distance of | | and | | with l. If , stop the cycle; otherwise, go to step (2). (2) If is CDP and satisfies the conditions of , delete and let , return to step (1). (3) If satisfies the condition of , and is CDP, delete but set as CNDP which will be retained for the reason of preserving relative density of point cluster, then let and return to step (1). (4) If , let , return to step (1).
3. Generalisation based on PT Step 8: Result after the selection based on PT --characteristic points (a) A segment of spectrum line (b) Characteristic points to be retained (c) Simplified result After the selection process based on PT, some of non-characteristic nodes are deleted, which indicates that several line-segment are deleted.
4. Case Study The feasibility of PT approach has been tested on the dataset of Basis DLM, which is from German mapping agencies and captured through map digitization in combination of semiautomatic object extraction from imagery data. At first, the characteristic features of road network are identified. Then, the individual road segments are replaced by their center points which can be transformed to a spectrum line. Finally, the point cluster will undergo a simplification.
4. Case Study Part of Basis DLM data with 735 segments
4. Case Study All center points of segments
4. Case Study Spectrum line in the polarization space with segmentation
4. Case Study The characteristic nodes must be preserved
4. Case Study 547 points are preserved by PT by parameters of
4. Case Study Final generalization result
5. Future work Theoretically, this PT-approach can be extended to involve other geometrical characteristics and any kind of semantic constraints, which will be researched in our future.