Download
1 / 1
20 likes | 186 Views
Solid solver. Fragmentation module. The key component of the cohesive element approach is the use of mesh adaption in order to tailor the computational mesh to the structure of the deformation field. In this context, the adaptivity is driven by a fracture criterion in the form of

E N D
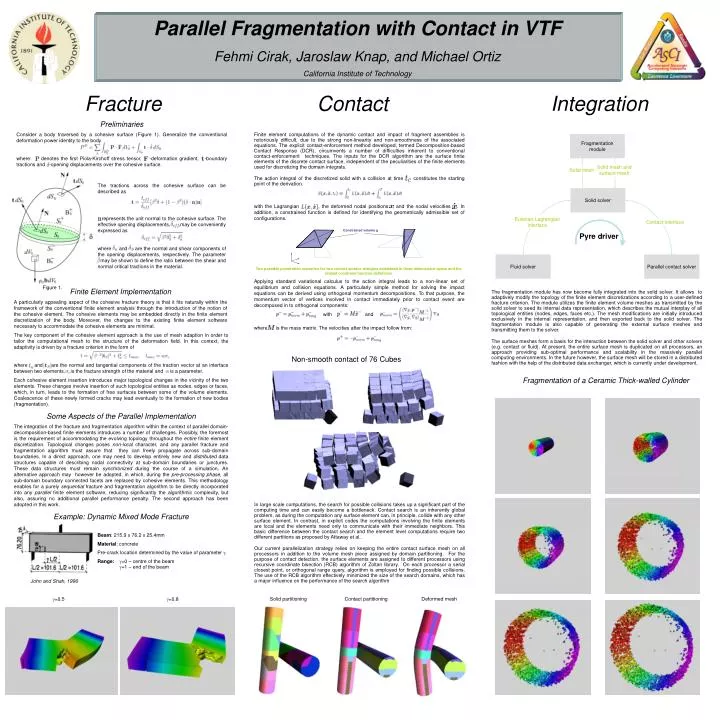
Solid solver Fragmentation module The key component of the cohesive element approach is the use of mesh adaption in order to tailor the computational mesh to the structure of the deformation field. In this context, the adaptivity is driven by a fracture criterion in the form of where and are the normal and tangential components of the traction vector at an interface between two elements. is the fracture strength of the material and is a parameter. Each cohesive element insertion introduces major topological changes in the vicinity of the two elements. These changes involve insertion of such topological entities as nodes, edges or faces, which, in turn, leads to the formation of free surfaces between some of the volume elements. Coalescence of these newly formed cracks may lead eventually to the formation of new bodies (fragmentation). Some Aspects of the Parallel Implementation The integration of the fracture and fragmentation algorithm within the context of parallel domain-decomposition-based finite elements introduces a number of challenges. Possibly, the foremost is the requirement of accommodating the evolving topology throughout the entire finite element discretization. Topological changes poses non-local character, and any parallel fracture and fragmentation algorithm must assure that they can freely propagate across sub-domain boundaries. In a direct approach, one may need to develop entirely new and distributed data structures capable of describing nodal connectivity at sub-domain boundaries or junctures. These data structures must remain synchronized during the course of a simulation. An alternative approach may however be adopted, in which, during the pre-processing phase, all sub-domain boundary connected facets are replaced by cohesive elements. This methodology enables for a purely sequential fracture and fragmentation algorithm to be directly incorporated into any parallel finite element software, reducing significantly the algorithmic complexity, but also, assuring no additional parallel performance penalty. The second approach has been adopted in this work. Example: Dynamic Mixed Mode Fracture John and Shah, 1990 g=0.5 g=0.8 Beam: 215.9 x 76.2 x 25.4mm Material: concrete Pre-crack location determined by the value of parameter g. Range:g=0 – centre of the beamg=1 – end of the beam Parallel Fragmentation with Contact in VTF Fehmi Cirak, Jaroslaw Knap, and Michael Ortiz California Institute of Technology Fracture Contact Integration Preliminaries Consider a body traversed by a cohesive surface (Figure 1). Generalize the conventional deformation power identity to the body where: denotes the first Piola-Kirchoff stress tensor, -deformation gradient, -boundary tractions and -opening displacements over the cohesive surface. Finite element computations of the dynamic contact and impact of fragment assemblies is notoriously difficult, due to the strong non-linearity and non-smoothness of the associated equations. The explicit contact-enforcement method developed, termed Decomposition-based Contact Response (DCR), circumvents a number of difficulties inherent to conventional contact-enforcement techniques. The inputs for the DCR algorithm are the surface finite elements of the discrete contact surface, independent of the peculiarities of the finite elements used for discretizing the domain integrals. The action integral of the discretized solid with a collision at time constitutes the starting point of the derivation. with the Lagrangian , the deformed nodal positions , and the nodal velocities . In addition, a constrained function is defined for identifying the geometrically admissible set of configurations. Applying standard variational calculus to the action integral leads to a non-linear set of equilibrium and collision equations. A particularly simple method for solving the impact equations can be derived using orthogonal momentum decompositions. To that purpose, the momentum vector of vertices involved in contact immediately prior to contact event are decomposed in to orthogonal components: with and where is the mass matrix. The velocities after the impact follow from: Solid mesh and surface mesh Solid mesh The tractions across the cohesive surface can be described as represents the unit normal to the cohesive surface. The effective opening displacements, ,may be conveniently expressed as where and are the normal and shear components of the opening displacements, respectively. The parameter may be shown to define the ratio between the shear and normal critical tractions in the material. Eulerian-Lagrangian interface Contact interface Constrained volume g Pyre driver Fluid solver Parallel contact solver Two possible penetration scenarios for two contact surface triangles embedded in three dimensional space and the related constraint function definitions Figure 1. Finite Element Implementation A particularly appealing aspect of the cohesive fracture theory is that it fits naturally within the framework of the conventional finite element analysis through the introduction of the notion of the cohesive element. The cohesive elements may be embedded directly in the finite element discretization of the body. Moreover, the changes to the existing finite element software necessary to accommodate the cohesive elements are minimal. The fragmentation module has now become fully integrated into the solid solver. It allows to adaptively modify the topology of the finite element discretizations according to a user-defined fracture criterion. The module utilizes the finite element volume meshes as transmitted by the solid solver to seed its internal data representation, which describes the mutual interplay of all topological entities (nodes, edges, faces etc.). The mesh modifications are initially introduced exclusively in the internal representation, and then exported back to the solid solver. The fragmentation module is also capable of generating the external surface meshes and transmitting them to the solver. The surface meshes form a basis for the interaction between the solid solver and other solvers (e.g. contact or fluid). At present, the entire surface mesh is duplicated on all processors, an approach providing sub-optimal performance and scalability in the massively parallel computing environments. In the future however, the surface mesh will be stored in a distributed fashion with the help of the distributed data exchanger, which is currently under development. Non-smooth contact of 76 Cubes Fragmentation of a Ceramic Thick-walled Cylinder In large scale computations, the search for possible collisions takes up a significant part of the computing time and can easily become a bottleneck. Contact search is an inherently global problem, as during the computation any surface element can, in principle, collide with any other surface element. In contrast, in explicit codes the computations involving the finite elements are local and the elements need only to communicate with their immediate neighbors. This basic difference between the contact search and the element level computations require two different partitions as proposed by Attaway et al.. Our current parallelization strategy relies on keeping the entire contact surface mesh on all processors in addition to the volume mesh piece assigned by domain partitioning. For the purpose of contact detection, the surface elements are assigned to different processors using recursive coordinate bisection (RCB) algorithm of Zoltan library. On each processor a serial closest point, or orthogonal range query, algorithm is employed for finding possible collisions. The use of the RCB algorithm effectively minimized the size of the search domains, which has a major influence on the performance of the search algorithm Solid partitioning Contact partitioning Deformed mesh