Download
1 / 37
370 likes | 458 Views
Distributed Problem Solving and Distributed Planning. Aydano Pamponet Giordano Ribeiro Prof. Jacques Robin. Introdução. Resolução de problemas distribuída definição mais geral equivalente a sistemas multiagentes

E N D
Distributed Problem Solvingand Distributed Planning Aydano PamponetGiordano Ribeiro Prof. Jacques Robin
Introdução • Resolução de problemas distribuída • definição mais geral equivalente a sistemas multiagentes • definição mais restrita: resolução de problema por meio de busca na qual a exploração do espaço de soluções é distribuída entre vários agentes • Busca distribuída: • são incapazes de explorar individualmente o espaço de soluções inteiro • ou exploram o espaço mais rapidamente quando cooperam
Introdução • Na solução distribuída de problemas: • coerência ( os agentes precisam querer trabalhar em grupo ) • competência ( os agentes precisam saber como trabalhar bem em grupo )
Introdução • Geralmente assumimos a coerência • os agentes já são projetados para trabalhar em grupo, os objetivos só são conseguidos se houver trabalho em grupo etc. • Nos concentramos na competência • como alguém joga em um time, trabalha em grupo num projeto, participa de uma orquestra etc.
Introdução • Muitos problemas envolvem a construção de um plano • Planejamento distribuído: • não apenas decompor problemas em subproblemas • como também: • alocar esses subproblemas entre os agentes • trocar soluções de subproblemas • Distributed Planning fortemente ligado comDistributed Problem Solving
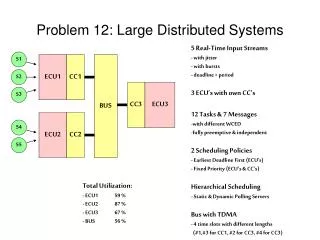
Motivações e Problemas Exemplos • Problemas com sub-tarefas iguais e independentes: • que podem ser executadas em paralelo para processamento mais eficiente (ToH) • que devem ser executadas em paralelo por distribuição inerente: • dos sensores (DNSE/DVM) ou dos efetuadores (DD) • percepção, atuação ou raciocínio podem ser distribuídos • Problemas com sub-tarefas distintas envolvendo competências especializadas (montagem de um carro)
Compartilhamentode tarefas • De idéia simples: • Quando um agente têm várias tarefas a fazer, ele recruta a ajuda de outros agentes com poucas ou nenhuma tarefa • Os principais passos são: • Decomposição • Alocação • Execução • Síntese dos resultados • Cada um pode ser trivial
Compartilhamento em ToH • Decomposição: <figura 3.3> • Alocação: • Como os agentes são igualmente competentes, a alocação resume-se a escolher randomicamente um deles • Execução/realização: • As tarefas são recursivamente decompostas até que o estado inicial e final sejam o mesmo • Síntese dos resultados: • Quando um agente resolve um problema, ele passa a solução para o de cima, que irá utilizá-la para encontrar sua própria solução
Compartilhamento de tarefasem sistemas heterogêneos • Com várias habilidades e tarefas, alocação de tarefa não trivial • Alocação não depende apenas de habilidade como também de carga • Então deve ser dinâmica • Exemplo de método de alocação dinâmica: redes contratuais
Rede Contratual (Contract Net) • Broadcast Contracting • Retry • Announcement Revision • Alternative Decompositions • E’ bom elaborar com Fig. 2.6
Tarefas interdependentes • Planejamento de sub-tarefas não pode ser inteiramente paralelizado como nas ToH • Conhecer estado inicial de uma subtarefa pode depender do plano construído para outra • As vezes a interdependência surge apenas durante a execução
Compartilhamentodos Resultados • Resultados diferentes para a mesma tarefa ?!? • Aspectos: • Confiabilidade • Completude • Precisão • Tempo de resposta
Compartilhamentodos Resultados • Cada agente manda todos seus resultados parciais para todos os outros agentes? • ex, spamming generalizado • Se for o caso, agentes podem consumir maioria dos seus recursos assimilando resultados recebidos e até impossibilitar encontrar uma solução • Como selecionar quais resultados mandar para quem quando?
Cooperação funcionalmente acurada • ToH: confiabilidade, completude e precisão garantidas, cooperação apenas para atingir eficiência • DVM: • cooperação necessária para atingir confiabilidade, completude e precisão • através de troca de hipóteses parciais • como combinar essas hipóteses parciais em uma solução completa? • como reificar hipóteses parciais inconsistente?
Functionally Accurate Cooperation • Espera-se que a troca leve a algum agente ter informação suficiente para chegar a solução • É necessário tomar certas decisões para evitar: • overhead de comunicação devido à grande quantidade de dados • Computação desnecessária (perdida/wasted) • Por exemplo: • Distração – todos os agentes explorando a mesma parte do espaço de busca • Possíveis soluções • Limitar a comunicação • Dar aos agentes um grau de “desconfiança” na hora de assimilar ou reagir a informações dos outros
Repositórios Compartilhadose Busca Negociada • Único repositório compartilhado de resultados parciais evita sobrecarga de comunicação • Muitas vezes pode ser formulado como problema de satisfação de restrições distribuído • Diferenças
Juntar com precedente • Não se supõe que os agentes sabem quais restrições são afetadas por suas escolhas • Motiva a utilização de um repositório compartilhado • Os agentes podem relaxar restrições num momento crítico • Motiva a utilização de uma heurística para controlar a busca distribuída
Busca heurística distribuída com restrições (pode tirar) • Problemas de satisfação de restrições também se devem a a contenção de recursos • Em vez de um repositório, associa-se um agente a cada recurso, dando a ele o poder de restringir a utilização de recursos. Esta estratégia possui duas formas: • Programação orientada ao mercado • agentes suportam a busca por equilíbrio de acordo com uma alocação eficiente dos recursos • Permitir aos recursos computarem suas “aggregate demands” • por exemplo, DCHS
Estruturação OrganizacionalRedo from scratch or scrap • Quando não pode-se suportar um repositório compartilhado ou quando problem-solving não é equivalente a resource scheduling, uma estratégia alternativa para reduz comunicação é explorar a estrutura de decomposição de tarefas • Em DVM, por exemplo, agentes vizinhos devem se comunicar quando detectarem atividade em suas fronteiras
Estruturação Organizacional • Estrutura organizacional define: • regras • responsabilidades • preferências • controle e comunicação entre os agentes • Alocação de tarefas e prioridades em termos de papeis organizacionais (organograma) • Define: • interesse dos agentes em resultados parciais procedentes de outros • confiabilidade desses resultados
Estruturação Organizacional • Geralmente implementadas com regras: • padrão de resultado parcial padrão de ação • Escolher estrutura organizacional envolve geralmente em si uma busca complexa
Estratégias de Comunicação • Estruturas organizacionais podem indicar quem geralmente está interessado em quais recursos, mas ignora aspectos temporais • É preciso encontrar um equilíbrio entre • mandar todos os resultados parciais • mandar apenas localmente resultados completos • Dependendo do problema pode fazer mais sentido enviar pedidos do que comunicar resultados
Planejamento Distribuído • Caso particular de resolução distribuída de problemas • onde o problema é fazer um plano • Exatamente o que é distribuído ?!?! • a execução do plano? • a elaboração do plano? • ambos?
Planejamento centralizado de planos distribuídos • plano executado de forma distribuída embora seja criado de maneira centralizada • as ações que não necessitam de ordem podem ser executadas de forma paralela • um agente coordenador centralizado pode gerenciar a execução dessa tarefas em paralelo
Planejamento centralizado de planos distribuídos 1. Gerar um plano de ordem parcial com o número mínimo possível de restrições de ordenamento 2. Decomponha o plano em subplanos de maneira que a minimizar a sobreposição de subplanos 3. Inserir ações de sincronização entre os subplanos 4. Alocar os subplanos para os agentes (task-passing) 5. Início da execução e monitoramento do processo.
Planejamento centralizado de planos distribuídos • Passamos a ter o objetivo: • encontrar entre todos os planos, o que pode ser decomposto e distribuído de forma mais eficiente • Impactos causados pela estrutura de comunicação: • as ações de sincronização, canais de comunicação podem deixar a execução distribuída mais lenta que a centralizada • na prática decompor planos apenas a partir de um tamanho mínimo
Planejamento distribuído de planos centralizados • Tem sua utilização quando os planos são complexos • Exigem a colaboração vários especialistas • Compartilhamento de tarefas e resultados também relevantes • ex, plano construído pela colaboração de 3 planejadores: • um de propósito geral • um especializado para raciocínio geométrico • um especializado para escalonamento
Planejamento distribuído de planos distribuídos • não existe um plano global da tarefa em nenhum ponto do sistema • apenas planos parciais de relevância local • mesmo assim, compatibilidade global entre esses planos parciais deve ser mantida • para evitar conflitos durante a execução • e fomentar ajuda mútua sempre que possível • 3 técnicas: fusão de planos, construção iterativa de planos e negociação em planejadores distribuídos
Fusão de planos • cada agente faz seu plano individualmente • depois, eventuais conflitos • têm que ser identificados e resolvidos • análise de alcance • dado um conjunto de estados iniciais • e um conjunto de ações • enumerar todos os estados possíveis • e inserir restrições nas seqüências • para eliminar os que devem ser evitados
Plan merging • <explicação de como funciona>