Download
1 / 9
260 likes | 861 Views
Actuators. ABE 425 Kaustubh Bhalerao. Different types of (electrical) motors. Type of driving voltage DC / AC Type of motion Continuous, stepped, servomechanism, rotary or linear H-bridge. H-bridge. DC motors. Brushed DC. Brushless DC. Armature has magnets

E N D
Actuators ABE 425 Kaustubh Bhalerao
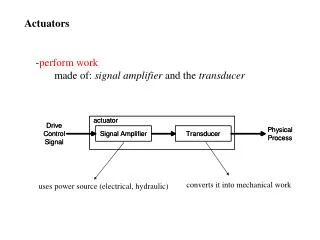
Different types of (electrical) motors • Type of driving voltage • DC / AC • Type of motion • Continuous, stepped, servomechanism, rotary or linear • H-bridge
DC motors • Brushed DC
Brushless DC • Armature has magnets • Stator is electronically commutated • High power-weight ratio • Compact, quieter • More complex to drive • Require expensive electronic speed control (ESC) • Applications – high-speed motors (drones, RC racers, medical equipment)
Steppers • Somewhat similar to brushless DC • Provide incremental rotating motion through discrete steps. 1 pulse = 1 step. • Bipolar / unipolar. Bipolar are easier to drive • Require stepper driver circuit • Useful for robotics – printer heads – where you need precise motion.
Servos • Limited range of motion (between 180-270 degrees) • Position is feedback-stabilized • Continuous rotation servos are available • Signal encoded as a PWM. Easy to drive • PWM period – 20 ms • Ton – 1-2 ms or 5-10% Duty cycle. • Robotics, avionic control
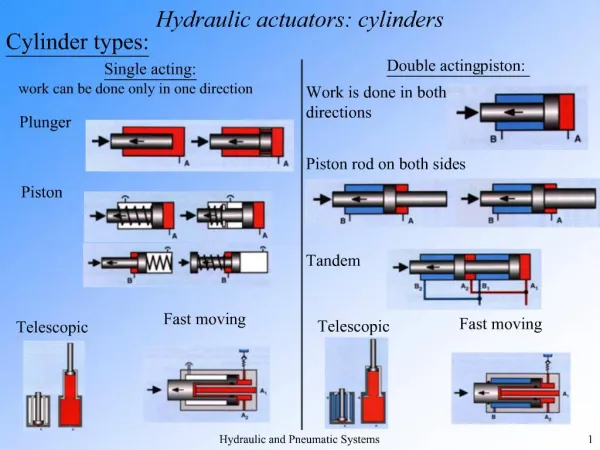
Linear motors • Continuous, direct, servo • Lifting platforms • Aircraft landing gear
Driving inductive devices • Inductive ‘kick’ • Must use protective diodes • True for relays, motors etc. • General de-coupling strategies.