Download

1 / 4
50 likes | 98 Views
In present time, children fall in the Borewell due to the carelessness nature of the people in society. The currently available systems to save the child are less effective and costly too. Thus the society is in need of a new technique which is more efficient and effective. In most cases reported so far, a parallel hole is dug and then horizontal path is made to reach the child. It is not only a time taking process, but also risky in various ways. The borewell rescue system is capable of moving inside the same borewell where the child has been trapped and performs various actions to save the child. CCTV camera is used to continuously monitor the child's condition. This system has a high power LED which acts as a light source since light intensity inside the hole will be less. The advancement in the field of automation along with the mechanical design has a great impact on the society. This project includes series of process development from hand drawn sketches to computer generated design. The modern equipments are implemented for various parts of the system, since the system performs a life rescuing activity. The light weight servomotors are implemented for the system's operations. Borewell rescue System is a human controlled computerized system embedded with additional safety devices. Nitin Agarwal | Hitesh Singhal | Shobhit Yadav | Shubham Tyagi | Vishaldeep Pathak "Child Rescue System from Open Borewells" Published in International Journal of Trend in Scientific Research and Development (ijtsrd), ISSN: 2456-6470, Volume-3 | Issue-4 , June 2019, URL: https://www.ijtsrd.com/papers/ijtsrd23847.pdf Paper URL: https://www.ijtsrd.com/engineering/electronics-and-communication-engineering/23847/child-rescue-system-from-open-borewells/nitin-agarwal<br>

E N D
International Journal of Trend in Scientific Research and Development (IJTSRD) Volume: 3 | Issue: 4 | May-Jun 2019 Available Online: www.ijtsrd.com e-ISSN: 2456 - 6470 Child Rescue System from Open Borewells Nitin Agarwal1, Hitesh Singhal2, Shobhit Yadav2, Shubham Tyagi2, Vishaldeep Pathak2 1Assistant Professor, 2B.Tech Student 1,2PG Department of ECE, R.B.S. Engineering & Technical Campus, Bichpuri, Agra, Uttar Pradesh, India How to cite this paper: Nitin Agarwal | Hitesh Singhal | Shobhit Yadav | Shubham Tyagi | Vishaldeep Pathak "Child Rescue System from Open Borewells" Published in International Journal of Trend in Scientific Research and Development (ijtsrd), ISSN: 2456- 6470, Volume-3 | Issue-4, June 2019, pp.639-642, URL: https://www.ijtsrd. com/papers/ijtsrd2 3847.pdf Copyright © 2019 by author(s) and International Journal of Trend in Scientific Research and Development Journal. This is an Open Access article distributed under the terms of the Creative Commons Attribution License (CC BY 4.0) (http://creativecommons.org/licenses/ by/4.0) I. INTRODUCTION Our project titled as “Child recue system from open borewell “ has been undertaken with the aim to save a life. Borewell accidents are common due to uncovered openings of borewell. It is very difficult and risky to rescue the trapped children. A small delay in the rescue can cost the child his or her life. Lifting the child out of the narrow hole of the borewell is not easy. The child who has suffered the trauma of the fall is confined to a smaller area where with the passage of time, the supply of oxygen reduces. ?The main objective of this project is to design and construct a portable system which is cost effective, quick in action and accurate. This system is also capable of performing life saving action like supplying oxygen. ?The Borewell Rescue System is capable of moving inside the well and performs operations according to the user commands. ?The system is operated through personal computer according to the observations made continuously using CCTV camera. I.I. NEED OF PROPOSED WORK The main purpose of this research is to save the life, child trapped inside the borewell safely. The problems in current existing methods are: ABSTRACT In present time, children fall in the Borewell due to the carelessness nature of the people in society. The currently available systems to save the child are less effective and costly too. Thus the society is in need of a new technique which is more efficient and effective. In most cases reported so far, a parallel hole is dug and then horizontal path is made to reach the child. It is not only a time taking process, but also risky in various ways. The borewell rescue system is capable of moving inside the same borewell where the child has been trapped and performs various actions to save the child. CCTV camera is used to continuously monitor the child’s condition. This system has a high power LED which acts as a light source since light intensity inside the hole will be less. The advancement in the field of automation along with the mechanical design has a great impact on the society. This project includes series of process development from hand drawn sketches to computer generated design. The modern equipments are implemented for various parts of the system, since the system performs a life rescuing activity. The light weight servomotors are implemented for the system’s operations. Borewell rescue System is a human controlled computerized system embedded with additional safety devices. Keywords: Integrated Camera, Mic, Video/Audio I/O, Arms IJTSRD23847 ?It takes up to 30 hours to dig the parallel pit 110ft, by the time the child would have died. ?Lack of oxygen inside the borewell. ?Lack of visualization causes the major difficulty during the rescue operation. ?There is no such equipment for rescuing the child which had fallen into the bore well. ?There is no interaction of child inside borewell and the parents. ?Children fall in the Borewell due to the carelessness nature of the people in society. ?The currently available systems are less effective and costly too. ?In most cases reported so far, a parallel hole is dug and then horizontal path is made to reach the child. It is not only a time taking process, but also risky in various ways. To overcome these lapses, we have designed and implemented a “Child Rescue System from Open Borewells” as our B.Tech. project. Which has following advantages: - 1.System is capable to get inside the same borewell the child’s fall. There is no need to dug a parallel hole. 2.It saves time with this system to rescue the child. 3.The child can be taken out of borewell safely. @ IJTSRD | Unique Paper ID - IJTSRD23847 | Volume – 3 | Issue – 4 | May-Jun 2019 Page: 639
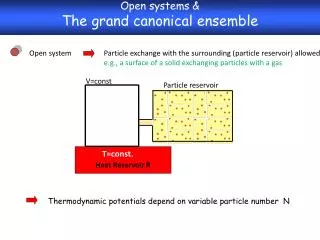
International Journal of Trend in Scientific Research and Development (IJTSRD) @ www.ijtsrd.com eISSN: 2456-6470 ?Preedipat Sattayasoonthorn and Jackrit Suthakorn[6] described a battery management for rescue system battery management for rescue systems is summarized in this paper as aguideline for new developers. This paper covers the topics of power consumption, battery selection, battery charging/ discharging and battery maintenance but this system requires more hardware and also its design is complicated so this system is costly. ?Wang Chuanjiang [7] Described The framework of rescue system is just, it is composed of rescue m*echanism, anchorage set, hoist set, manipulator, frame work, control and communication system. The system system can undertake the rescue tasks for small caliber wells, whose diameters can change from 1m to 0.3m by replacing some mechanisms. This system can be used for small caliber well rescue system. It requires more hardware. ?Palwinder Kaur , Ravinder Kaur, Gurpreet Singh [8] made an autonomous system having self moving and self sustaining capacity. Wheeled leg mechanism is employed in this design to go inside the pipe. The legs are circumferentially and symmetrically spaced out 120 apart. LM-35 Temperature Sensor and 16X2 LCD are interfaced with PIC 16F877A microcontroller to sense the temperature inside the bore well and to display it respectively. ?K. Saran, S. Vignesh, Marlon Jones Louis [9] have done a human controlled computerized machine to rescue the child by using servo motors to hold the child and the safety balloons are used beneath the child to provide an additional safety to the child. This project includes series of process development from hand drawn sketches to computer generated design Hon Jose Pattery ,Jittu Varghese Kurian , Noble K John have done a prototype consists of four mechanisms driven separately The motor placed at the top turns a gear mechanism which, in turn, pushes 3 blocks arranged at 120 degrees from each other towards the side of the bore well. ?B. Bharathi, B. Suchitha Samuel [10] have done a wirelessly controlled system using Zigbee technology and dc motor based gripper operation for systemic arm. This prototype uses PIC 16F877A microcontroller in the operation of rescuing the child. The system is operated through PC using wireless Zigbee technology and using wireless camera we can view both audio and video on the TV. III. METHODOLOGY The entire system is manually controlled by the user. The functional block diagram of Borewell Rescue System is as shown in figure: I.II. OBJECTIVE OF RSEARCH WORK The objective of our B.Tech. final year project work entitled “Child Rescue System from Open Borewells” are as follows: 1.Manually monitoring the child with the help of camera and controlling unit of system. 2.Communicating with the system by sending appropriate commands to it and activate the suitable motors. 3.Once the system has reached proximity of child, it is stopped immediately and is given the commands by the controlling device to perform the closing of the systemic arms. 4.Controlling a system to takeoff the child inside the bore well, which is controlled by sthe person from outside. II. REVIEW OF THE RELATED LITERATURE For finalizing objective of our project work we have reviewed following research papers majorly being related with the technology which we have used in our project work “Rescue System from Open Borewells”, apart from books and websites. ?Kavianand .G [1] describes the designing a system for rescue a child from inside bore well. This system is capable of moving inside the bore well. This Smart Child Rescue System consists of PIR sensors which help to sense only humans irrespective of the external conditions. In this system Raspberry pi is used which is costly than Arm microcontroller. It requires more peripherals. ?Nish Mohith Kurukuti [2] describes the rescue operations without human intervention. The system can adjust its legs according to the pipeline dimensions. The system consists of power supply, actuators, and dc motor, servo motor. The child position is captured from bore well with Camera module and monitored on PC. The ultrasonic sensor interfaced with arduino. The arduino uses a microcontroller not an application processor, so can not run any operating system on it. You can not get a video output or Ethernet port on arduino. ?Manish Raj [3] describes the diameter of the narrow borewell for any adult person because light goes dark inside it, the rescue task is challenging. The systemic system attaches a harness to the child using pneumatic arms for picking up. A teleconferencing system is also attached to the system for communicating with the child. ?N. Bourbakis and I. Papadakis-Ktistakis [4] describes design of two mcomplementary role to existing larger systemic structures, which mainly perform different rescue tasks. Here the micro-system, called This as, is under development by a research team consisted of researchers from the ATRC-WSU (micro-design, software), the Ohio (micro-antennas).icro-systemic structures in an effort for assisting the detection of human under debris and rescue them. These microstructures will play. ?K. P. Sridhar C. R. Hema S. Deepa [5] described a wireless sensor fusion system in the mechanical gripper systemic arm to assist the rescue operation and paramedical team effectively. Multiple sensors are interfaced to the wireless sensor fusion system to acquire the important parameters such as humidity, temperature, CO, and other gaseous levels from the bore well to monitor the condition of the child inside the bore well. In this system pic microcontroller is used which has low speed operation than Arm. State University Fig 1.Block Diagram of the designed system @ IJTSRD | Unique Paper ID - IJTSRD23847 | Volume – 3 | Issue – 4 | May-Jun 2019 Page: 640
International Journal of Trend in Scientific Research and Development (IJTSRD) @ www.ijtsrd.com eISSN: 2456-6470 ?Hence, the child can be safely taken out from the borewell using this mechanism. IV. RESULT All the objectives had been fulfilled successfully and thus we are able to design a child rescue system to save live. child rescue system isdesignedwithtwo arms, integrated camera, LED lights, audio and video. The system is capable of moving inside the borewell from the same hole and perform the rescue operation. The digitally integrated camera helps to view the position of the child. There is a mic in the camera which helps to interact with the child. The photo of our project is shown in fig.3. Thus the desihgned system is helpful in saving the child trapped inside borewell. It can replace all the old existing technology as it is safer and takes very less time. Saving a life is a big task and we have successfully made this project in order to rescue child in future in lesser time. The existing technology was very much costlier than the cost of our project. We have used the light weighted servo motors so that the system is not heavy and also it is precise. V. CONCLUSION Human life is precious. Our bore well child recue system is a significant attempt to save the life of the victim of bore well accidents. Besides this, the unique capability of climbing through vertical and inclined pipes makes wide scope of application for this machine in manufacturing industries and other relevant fields. In the current design of bore well child saver machine has been made to suit every possible situation may occur in rescuing operation. Further, we would like to conclude that with the help of our project, we would be able to rescue the child safely within short period of time. Our proposed system consists of mainly two round plates. The full hardware system has been illustrated by the. A mechanical system will be attached to the higher plate which will try to release two linear actuation units which will hold the system in position by pushing the wall of the bore-well. Another mechanical gear system will be attached which will rotate the lower plate to get position it in plane with the victim. Two arms will be attached to the lower plate. Two high resolution cameras will be attached downwards in the lower position of the lower plate. The high resolution cameras will provide the view of the well environment which will be highly helpful in telecome the two arms. As the bore well environment is a dark environment the system will be having lights which will provide enough lighting conditions for the operation of the system. The pneumatic arms will be having another two individual cameras for each arm which will publish the view of the arms. A chest mount harness will be attached with the system which will be highly essential in picking up the victim from the bore well. Fig.2 . Previous Existing Method The systemic arms will be tele operated to attach the straps of harness around the victim. As from the upper mounted cameras we can only observe the upper view of the situation, the task will get complicated if the victim will not be co- operative or get senseless. As the system attaches the harness to the victim, the victim would be ready to pickup. As various commercial harness are available today we choose to use the chest harness to reduce the complexity of the task. A chest harness is capable of lifting a 15 yr old boy easily. The chest harness lifting a boy is shown in Fig.2. III. WORKING ?All the parts of the system are controlled manually outside the borewell using 2 DPDT Switches(1 for rotating DC motor clockwise and anticlockwise, 2 for the opening and closing of the claws). ?System is taken inside the borewell using pulley and rope mechanism to reach up to the child by visualizing through camera A/V output. ?Child live position is captured through camera and communication is done with the child with the help of mic and an operational amplifier 7805. ?The harness of the system used in two arms is very soft so that it do not hurt the child while gripping. ?The system is rotated using DC motor according to the child position ?The child is gripped from suitable position and then the system is taken out from the borewell by pulling the rope. Fig.3. Photo of the project REFERENCES [1]G. Kavianand, K. Gowri Ganesh, P. Karthikeyan, “Smart child rescue system from borewell” (SCRS), Published in: Emerging Trends in Engineering, Technology and Science (ICETETS), International Conference on, 24-26 Feb. 2017 [2]N. M. Kurukuti, M. Jinkala, P. Tanjeri, S. R. Dantla and M. Korrapati, “A novel design of systemic system for rescue in bore well accidents”, 2016 International Conference on Systemics and Automation for Humanitarian Applications (RAHA), Kollam, 2016, pp. 1-5.doi: 10.1109/RAHA.2016.7931875 @ IJTSRD | Unique Paper ID - IJTSRD23847 | Volume – 3 | Issue – 4 | May-Jun 2019 Page: 641
International Journal of Trend in Scientific Research and Development (IJTSRD) @ www.ijtsrd.com eISSN: 2456-6470 [3]Raj Manish, P. Chakraborty, G. C. Nandi, Rescue systemics in bore well Environment, Cornell university library 5thJune,2017 [8]Palwinder Kaur, Ravinder Kaur, Gurpreet Singh “Pipeline Inspection Rescue System”, IEEE, VOL3,NO. 4,April 2014. and Bore well [4]4. N. Bourbakis and I. Papadakis-Ktistakis ATRC, “Design Ground Bio-inspired Micro-System Structure for Detecting Humans in disastrous region”. Wright State University, Dayton, OH 45435 and Technical University of Crete, Greece.10thJune,2017 [9]K. Saran, S.Vignesh, Marlon Jones Louis “Bore- well Rescue System” International journal of research aeronautical VOL 1, Issue 4, pg.61-80, April 2014. [10] B. Bharathi, B. Suchitha Samuel “Design and Construction of Rescue System and pipeline inspection Using Zigbee” International Journal of Scientific Engineering and Research(IJSER) Volume 1 Issue 1, September 2013. [5]K. P. Sridhar, C. R. Hema, S. Deepa Published online: “Design of a Wireless Sensor Fusion System to Analyze Conditions Inside Bore Wells”. Wireless Pers Commun (2017) 94:1951–1962 DOI 10.1007/s11277-016-3299- 4 on 12 April 2016. [11] G. Nithin, G. Gautam, G. Venkatachalam and S. Narayana “Design and stimulation of the bore-well rescue system – Advanced Asian Research Publishing Network (ARPN)” Journal of engineering and applied sciences. [6]Preedipat Sattayasoonthorn, “Battery Management for Rescue System Operation” 9th July,2017. [7]Wang Chuanjiang, and Robert Babuska. "Machine Learning Algorithms in Bipedal System Control." Systems, Man, and Cybernetics, Part C: Applications and Reviews, IEEE Transactions on 42, no. 5 (2012): 728- 743 [12]John Jose pottery, "system for bore well rescue", amaljothi college of engineering, vol. 10, Jun 2017. @ IJTSRD | Unique Paper ID - IJTSRD23847 | Volume – 3 | Issue – 4 | May-Jun 2019 Page: 642