Download
1 / 6
60 likes | 196 Views
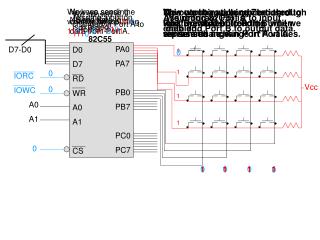
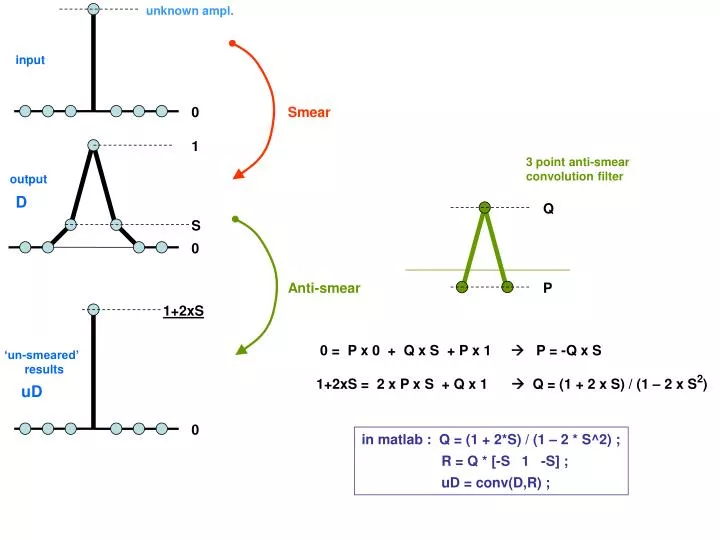
unknown ampl. input. 0. Smear. 1. 3 point anti-smear convolution filter. output. D. Q. S. 0. Anti-smear. P. 1+2xS. 0 = P x 0 + Q x S + P x 1 P = -Q x S 1+2xS = 2 x P x S + Q x 1 Q = (1 + 2 x S) / (1 – 2 x S 2 ). ‘un-smeared’ results. uD. 0.

E N D
unknownampl. input 0 Smear 1 3 point anti-smear convolution filter output D Q S 0 Anti-smear P 1+2xS 0 = P x 0 + Q x S + P x 1 P = -Q x S 1+2xS = 2 x P x S + Q x 1 Q = (1 + 2 x S) / (1 – 2 x S2) ‘un-smeared’ results uD 0 in matlab : Q = (1 + 2*S) / (1 – 2 * S^2) ; R = Q * [-S 1 -S] ; uD = conv(D,R) ;
a Compensation Filtercourtesy of G.Rehm DLS FFT Inverse these coeff. at 0 in my first simple anti-smear, Kees IFFT
In blue : ‘3’ point anti-smear filter In green : ‘5’ point anti-smear filter
maf Standard raw data 5-point Anti-smear 3-point Anti-smear Note : horizontal shifts between 4 curves are deliberate to better distinguish the curves