Download
1 / 11
110 likes | 255 Views
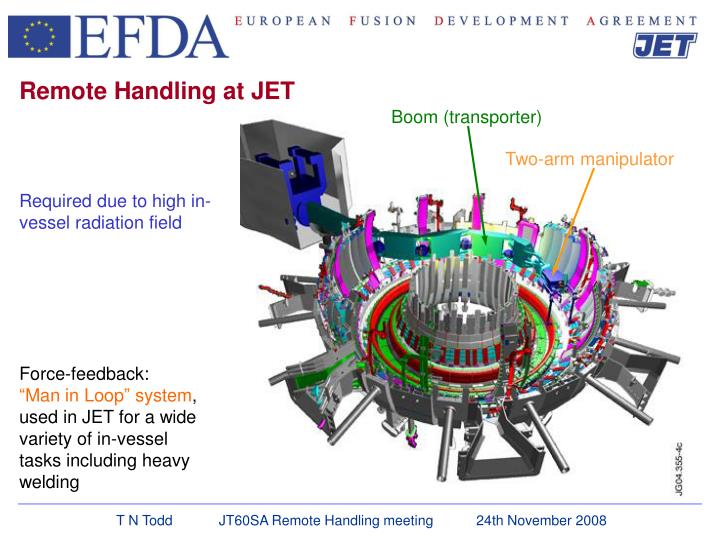
Boom (transporter). Two-arm manipulator. Remote Handling at JET. Required due to high in-vessel radiation field Force-feedback: “Man in Loop” system , used in JET for a wide variety of in-vessel tasks including heavy welding. Handling - installation and removal

E N D
Boom (transporter) Two-arm manipulator Remote Handling at JET Required due to high in-vessel radiation field Force-feedback: “Man in Loop” system, used in JET for a wide variety of in-vessel tasks including heavy welding
Handling - installation and removal Welding - eg 20mm MIG “plug” welds Photogrammetry - camera and targets Testing wiring Cleaning plasma diagnostic windows Tile detritiation by intense flash-lamp In-vessel inspections Plasma diagnostics calibration Vacuum cleaning Wire-brushing Thread tapping Filing Much preparatory work is done in Virtual Reality TAE Antenna Carrier assembly being moved by MASCOT Remote handling capability in JET
Octant 5 Octant 1 MASCOT accessing Task Module ILW needs two Remote Handling booms acting in synergy
Bolt Runners Torque Wrench W4 Tile Carrier Tool Top (W24) Tile Carrier Tool Standard Wide Tile Carrier Tool W5 Tile Carrier Tool Bottom (W1) Tile Carrier Tool Examples of poloidal limiter tile-carrier tooling The ILW tiles are on carriers but these require interface tooling
JET In-vessel dose rate history (& projection from April 2007)
Generic tools Remote Handling tooling Ring spanner Torque wrench Bolt runner Portable camera
Trolley Main Boom Section Flanged Joint Vertical Traverse Section Slewing Ring Flange Task Module ILW requires second toroidal-access boom • Necessitates extension and rebuild of existing “Octant 1” boom