Download
1 / 1
10 likes | 132 Views
Robotic implementation of gaze control and image stabilization (FCT-UC). Probabilistic Block Matching Optical Flow. Integrated Multimodal Perception Experimental Platform (IMPEP). S imple probabilistic optical flow algorithm:

E N D
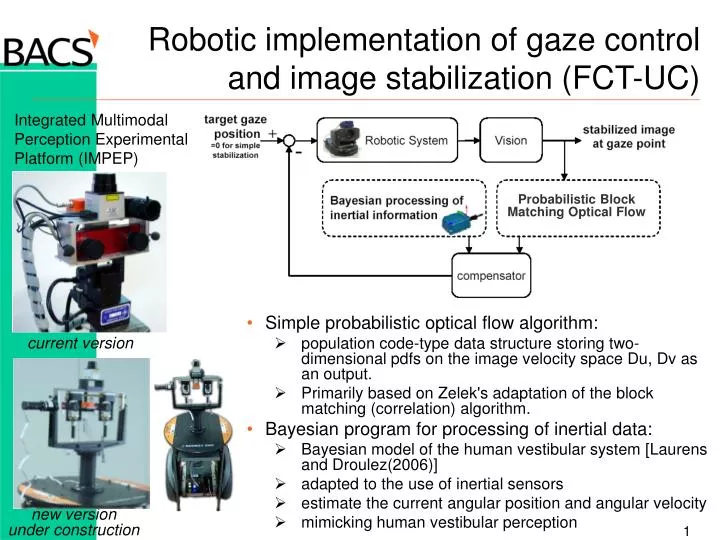
Robotic implementation of gaze control and image stabilization (FCT-UC) Probabilistic Block Matching Optical Flow Integrated MultimodalPerception ExperimentalPlatform (IMPEP) • Simple probabilistic optical flow algorithm: • population code-type data structure storing two-dimensional pdfs on the image velocity space Du, Dv as an output. • Primarily based on Zelek's adaptation of the block matching (correlation) algorithm. • Bayesian program for processing of inertial data: • Bayesian model of the human vestibular system [Laurens and Droulez(2006)] • adapted to the use of inertial sensors • estimate the current angular position and angular velocity • mimicking human vestibular perception current version new version under construction