Download
1 / 5
50 likes | 304 Views
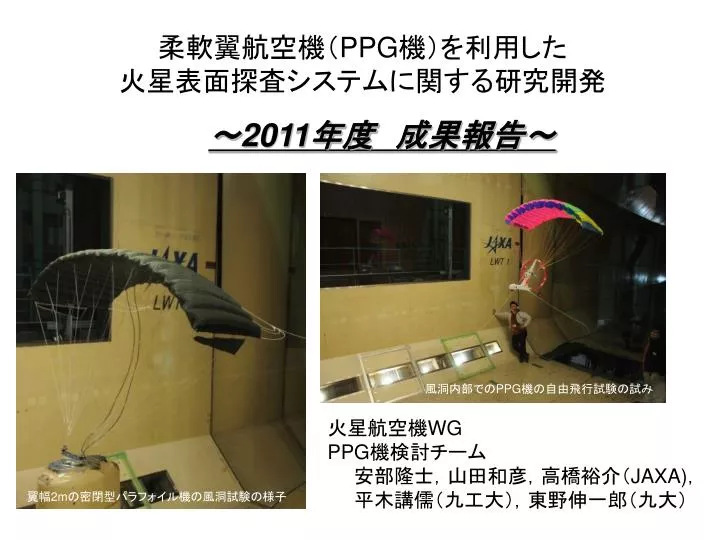
柔軟翼航空機( PPG 機)を利用した 火星表面探査システムに関する研究開発. ~ 2011 年度 成果報告~. 風洞内部での PPG 機の自由飛行試験の試み. 火星航空機 WG PPG 機検討チーム 安部隆士,山田和彦,高橋裕介( JAXA) , 平木講儒(九工大),東野伸一郎(九大). 翼幅 2m の密閉型パラフォイル機の風洞試験の様子. < 2011 年度,研究課題>. 柔軟エアロシェル大気突入機と PPG 機による火星探査システムについて,昨年度行った成立性の検討を踏まえて抽出された下記の主要な技術課題について研究を進めた..

E N D
柔軟翼航空機(PPG機)を利用した 火星表面探査システムに関する研究開発 ~2011年度 成果報告~ 風洞内部でのPPG機の自由飛行試験の試み 火星航空機WG PPG機検討チーム 安部隆士,山田和彦,高橋裕介(JAXA), 平木講儒(九工大),東野伸一郎(九大) 翼幅2mの密閉型パラフォイル機の風洞試験の様子
<2011年度,研究課題> 柔軟エアロシェル大気突入機とPPG機による火星探査システムについて,昨年度行った成立性の検討を踏まえて抽出された下記の主要な技術課題について研究を進めた. 1)パラフォイル傘体について 火星特有の環境に適していると考えられる 密閉型のパラフォイルの採用 *密閉型パラフォイルの性能評価 *揚抗比測定の試験方法の確立 2)推進器について コンパクトに収納できる折り畳プロペラの低密度での性能把握 *折りたたみ翼(N型)の試作 *試作品の性能評価 3)航法について GPSのない環境での航法の確立 *画像を利用した位置同定方法の確立 *試験用機体での実証試験 今後,これらの結果を踏まえて,システム成立性検討の精度を上げ,具体的なミッション提案にむけた準備を進める予定である.
<パラフォイル傘体> 密閉型パラフォイル(翼幅2m)の試作と揚抗比測定方法の確立(担当:JAXA) 3)翼幅2mのパラフォイル(曳航試験と同じもの)を用いてJAXA調布の6.5m×5.5m大型低速風洞で風洞試験を実施. 1)車による曳航試験を実施 密閉型パラフォイル 不安定 揚抗比が倍に 安定性に問題があり,風洞試験で詳細に調べる必要ありとの判断. 比較用のラムエア型 2)小型模型による風洞試験を実施 風洞内で,パラフォイルを安定状態にすることができ,揚抗比の測定を精度よく行うことができた.そして,密閉型パラフォイルでは,揚抗比が4~5程度を実現できることが確認できた(比較用のラムエアでは2~2.5程度). 1m *)風洞内での自由飛行試験の試み 将来の実機開発にむけて,PPG機の動的な挙動や運動特性を調べるためには,自由飛行試験が必須となる.ホビー用のPPGラジコン機を用いて,風洞内での自由飛行試験方法の確立を目指した試験を実施した. @JAXA相模原惑星環境風洞 風洞試験方法の確立,ライザーのセッティングと安定性の関係を理解した.
<パラフォイル傘体,推進器> 風洞試験による密閉型パラフォイルと推進用プロペラの性能評価(担当:九工大) ガス供給式パラフォイルの翼内外差圧の影響 推進用プロペラ(1/4模型)の気流内推力測定 火星用に設計したプロペラを通常の風洞内に設置し推力を測定 折りたたみ時 火星飛行中,高度変化により,大気圧が最大300Pa変化する インレット有り予測値 (400Paの結果にインレット抗力0.04を加算) 展開時 実験条件 • アスペクト比2.25の3次元翼 • 翼はエバール製 • ラインによる支持,翼端後縁部から チューブを介しガス供給と内圧測定 • 測定抗力にはライン抗力,チューブ抗力を含む 実験条件 プロペラ諸元(1/4模型) 上図(ポーラーカーブ)から,差圧を高めるほど揚抗比が改善される傾向が見られる.インレットの存在による抗力増加は差圧変化による影響よりも大きく,ガス供給式にすることで揚抗比向上のみならず,高度変化にも問題なく対応できる. 測定結果より,地球上大気圧下における推力予測値とよい一致が見られる.火星条件下に合わせたアスペクト比の小さな特殊な形状のプロペラであってもAdkinsとLiebeckの理論を用いて設計が可能である.
データベース画像 撮影画像 時刻 比較 比較 <航法>GPSのない状況での航法の確立 (担当:九大) 比較・ 初期位置 同定 フレーム1 無人機によって取得した画像データの解析による位置・速度同定 フレーム2 供試機体 フレーム3 高度 対地速度 ・SIFT(Scale Invariant Feature Transformation) を基本同定法とした特徴抽出・マッチング ・初期位置同定 データベース画像とのマッチングにより初期位置を同定. 処理時間と画像解像度の違いによる誤同定削減が課題. ・初期位置以降の位置・速度同定 直前フレームとのマッチングにより位置・高度・速度を同定. 数値微分に伴うノイズ低減のためのフィルタリング処理, および機体の姿勢変化に伴う画像位置変動の補正が必要. 水平位置 針路 GPSデータと画像解析による位置・速度・針路の比較例