Download
1 / 15
160 likes | 194 Views
This research presents an alternative formulation utilizing Spherical Distance Geometry for position analysis of RCCC four-bar linkages, providing a more geometric and compact method. The study explores the concept of Gramians for point locations and discusses extending Gramians to Dual Angles for spatial mechanisms analysis.

E N D
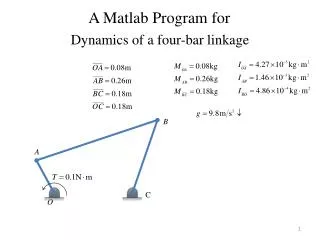
A New Insight into the CouplerCurves of the RCCC Four-Bar Linkage Federico Thomas Institut de Robòtica i Informàtica Industrial (CSIC-UPC), Barcelona, 08028 Spain Alba Pérez-Gracia Department of Mechanical Engineering, Idaho State University, Pocatello, Idaho, 83209 USA
Introduction. The RCCC Four-Bar Linkage • The position analysis of the CCCC linkage in the Euclidean space is equivalent to solving the position analysis of the corresponding single-dof spherical • four-bar linkage in the dual unit sphere. • It is possible to derive the loop equation of this spherical four-bar linkage as the product of 3×3 or- • thogonal transformation matrices with dual number elements. INPUT OUTPUT • The RCCC linkage is the most general spatial four-bar linkage with mobility one. • This linkage has been proved to be a good testbed in which to try and evaluate new ideas concerning the position analysis of spatial mechanisms.
Alternative formulation In this paper we propose an alternative formulation, based on Spherical Distance Geometry, which is much more compact, more geometric and somewhat less algebraic. In spherical geometry, the shortest distance between two points (geodesic distance) is the length of an arc of a great circle containing both points. The distance between two points on the unit sphere is the angle between the vectors from the origin to the points and which will be denoted by . If we assume that , the mapping between and becomes one-to-one. Observe that a link with twist angle is kinematically equivalent to a link with twist angle . We will indistinctly use or when referring to the distance between Pi and Pj .
Gramians I Giventhelocationvectors of points
Gramians II Gramians are zeroif, and onlyif, theinvolvedcoordinatevectors are linearlydependent, and strictly positive otherwise. NegativeGramiansonlyarise in thosesituations in whichthegiveninterpointdistances do notcorrespondtoanyconfiguration of real points. ThefollowingGramian vanishesif, and onlyif, lie on a unitthree-dimensional sphere.
The derivatives of Gramians It is easy to prove that Then, using the implicit function theorem, we have that
The four points lie on the sphere if, and only if, • The root locus of its real part in the plane defined by and can be easily plotted by remembering that then
Using the spherical rule of cosines, we have the affine relationships
Conclusions • The position analysis of a RCCC linkage in the Euclidean space is equivalent to solving the position analysis of a spherical four-bar linkage in the dual unit sphere. • It have shown how this problem can be solved using Distance Geometry in the dual unit sphere. This result opens the possibility of using Cayley-Menger determinants with dual arguments to compactly formulate other geometric problems. • We are currently extending this approach to the analysis of 5-bar spatial mechanisms.