Download
1 / 9
340 likes | 2.14k Views
SYSTEME DE CORRECTION DE PORTEE D’UN PHARE AUTOMOBILE. Certaines voitures sont équipées de système de correction de portée. Ce système fait appel à des capteurs d‘assiette reliés aux essieux avant et arrière du véhicule.

E N D
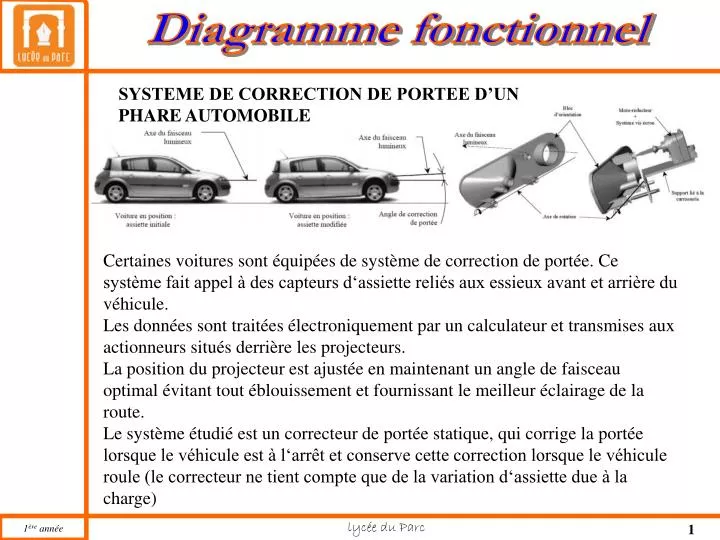
SYSTEME DE CORRECTION DE PORTEE D’UN PHARE AUTOMOBILE Certaines voitures sont équipées de système de correction de portée. Ce système fait appel à des capteurs d‘assiette reliés aux essieux avant et arrière du véhicule. Les données sont traitées électroniquement par un calculateur et transmises aux actionneurs situés derrière les projecteurs. La position du projecteur est ajustée en maintenant un angle de faisceau optimal évitant tout éblouissement et fournissant le meilleur éclairage de la route. Le système étudié est un correcteur de portée statique, qui corrige la portée lorsque le véhicule est à l‘arrêt et conserve cette correction lorsque le véhicule roule (le correcteur ne tient compte que de la variation d‘assiette due à la charge)
Questions : • Tracer la bête à corne du produit Conducteur Phares Correcteur de phare Régler verticalement les phares
Questions : Tracer le diagramme des interacteurs en phase d’utilisation Conducteur Phares FC5 Environnement FP1 Correcteur de phare FC4 Vibrations FC3 Pesanteur FC1 FC2 Voiture FC1 : Supporter les vibrations FC2 : S’adapter à la voiture FC3 : Avoir un poids<0,2kg FC4 : Résister à l’environnement FC5 : S’adapter aux phares FP1 : Permettre le réglage des phares depuis l’habitacle.
Chaine d’information et d’énergie du système Calculateur Sphère Vis/Ecrou Hacheur Roue et vis sans fin n°2 Batterie Roue et vis sans fin n°1 Moteur CC
La chaîne d‘action complète comprend : • L‘ensemble transducteur (capteur + amplificateur + calculateur) qui mesure l‘angle de tangage β du véhicule et commande le moteur du système. L‘ensemble est assimilable à un gain pur : Kc . • Le moteur à courant continu dont la fonction de transfert est notée M(p). • On équipe ce moteur d‘un retour tachymétrique assimilable à un gain pur : Ktachy=0,03 V/(rad/s) • Le réducteur de vitesse dont le rapport de réduction est de 490, • L’ensemble vis-écrou (de pas p = 6mm) qui transforme la rotation de l’axe du réducteur en translation de l’axe de sortie. • Le bloc d‘orientation : l‘angle de correction de portée θ(t) étant petit, on peut linéariser la loi entrée sortie sur le domaine d‘utilisation ; l‘angle θ(t) est proportionnel au déplacement x(t) de la vis Question : Compléter le diagramme fonctionnel de la chaîne d‘action ci-dessous, en précisant le nom ou les valeurs des blocs et les variables intermédiaires avec leurs unités. β θ X Ωm Ωr θr U(v) Réducteur Bloc orientation + Vis/écrou M(p) Kc - rad rad rad/s rad/s V rad m V Ktachy =0,03
La réponse à une entrée échelon n’est pas satisfaisant. L’angle de correction ne tend pas vers une valeur constante alors que l’entrée est constante (le système diverge). Pour remédier à ce problème on asservit le système en position en plaçant : • un capteur de position, de gain Kpos , qui mesure l‘angle θ, • un Correcteur de gain A. Question : Tracer le nouveau diagramme fonctionnel de la chaîne d‘action en précisant le nom ou les valeurs des blocs et les variables intermédiaires avec leurs unités. Ωm β θ X Ωr θr Réducteur Bloc orientation Vis/écrou + M(p) + Kc A - - rad rad rad/s rad m V Ktachy =0,03 Kpos
La réponse temporelle du système corrigé est donnée ci-dessous. TR5%= 0,1s Question : Conclure sur la stabilité, la rapidité et la précision du système. SYSTÈME STABLE ERREUR STATIQUE NULLE