Download
1 / 31

E N D
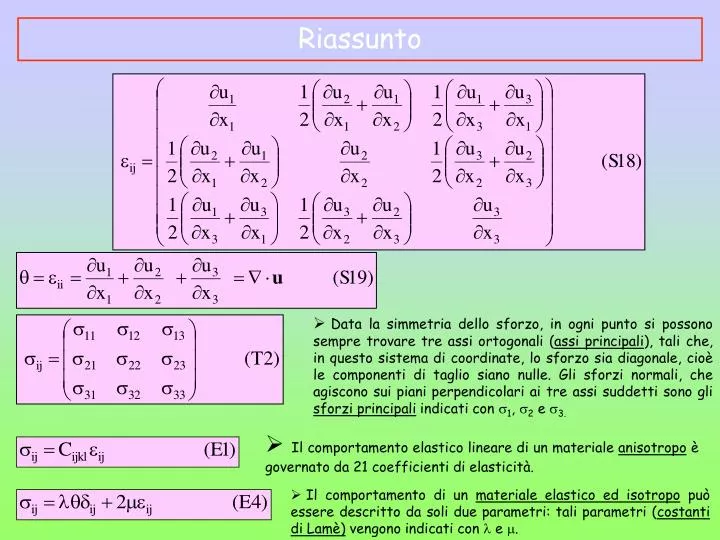
Riassunto • Data la simmetria dello sforzo, in ogni punto si possono sempre trovare tre assi ortogonali (assi principali), tali che, in questo sistema di coordinate, lo sforzo sia diagonale, cioè le componenti di taglio siano nulle. Gli sforzi normali, che agiscono sui piani perpendicolari ai tre assi suddetti sono gli sforzi principali indicati con 1, 2 e 3. • Il comportamento elastico lineare di un materiale anisotropo è governato da 21 coefficienti di elasticità. • Il comportamento di un materiale elastico ed isotropo può essere descritto da soli due parametri: tali parametri (costanti di Lamè) vengono indicati con e .
Deriviamo le equazioni delle onde elastiche. Consideriamo un elemento cubico di dimensione infinitesima ed imponiamo l’equilibrio dinamico alla traslazione nella direzione x1: otteniamo: Onde Elastiche dove rappresenta la densità del materiale ed f1 rappresenta la componente della forza di volume lungo la direzione x1.
imponendo l’equilibrio lungo le altre due direzioni si ha: in notazione compatta: • Come vedremo più avanti, la sorgente sismica può essere convenientemente rappresentata anche da un sistema di forze di volume f. Se nell’equazione (O2) trascuriamo sia gli effetti gravitativi sia le componenti della sorgente sismica otteniamo le equazioni differenziali omogenee del moto: Riscriviamo l’equazione omogenea per la direzione x1:
dalla legge di Hooke possiamo ricavare le componenti della tensione in funzione della deformazione e delle costanti di Lamè: e: a questo punto sostituiamo le componenti della tensione nella equazione del moto assumendo che e siano costanti nel continuo: da cui:
per la direzione x1 si ha: analogamente per le direzioni x2 e x3 : in forma vettoriale: in forma indiciale: L’equazione (O5) rappresenta l’equazione del moto in termini di spostamento per un continuo infinito elastico ed omogeneo. Il primo termine è un gradiente della divergenza e il secondo è il laplaciano dello spostamento. E’ una equazione differenziale di secondo ordine alle derivate parziali rispetto alle variabili spaziali xi e il tempo t.
ricordando la seguente identità: Sostituendo in : Otteniamo: O in forma indiciale: Ricordiamo che : Dove wrappresenta il tensore rotazione. Introduciamo il vettore rotazione w che è definito come il rotore dello spostamento u:
La i-esima componente del vettore rotazione wpuò essere espressa attraverso il tensore permutazione e come: Quindi esprimere il vettore rotazione win funzione del tensore rotazione w nel seguente modo: La nostra equazione del moto è: Sostituendo dividendo per r e ricordando la definizione di dilatazione cubica otteniamo: In forma vettoriale:
Nel caso di mezzo non omogeneo si ottiene una equazione del tutto analoga alla (O6) ma in questo caso compaiono anche i gradienti dei moduli elastici: • L’equazione (O5) o (O6) descrive la propagazione di onde elastiche in un continuo omogeneo ( e costanti) infinito , elastico, lineare. E’ un sistema di equazioni differenziali alle derivate parziali dove l’incognita è rappresentata dalla funzione u(x.t)(spostamento dei punti del continuo). • La ricerca della soluzione del problema rappresentato dalla equazione (O7) è un esempio classico di risoluzione del “problema diretto” in sismologia : nota una sorgente sismica (per ora non rappresentata nelle equazioni) nota la struttura dell’interno della Terra ((x.t), (x.t), (x.t)) si “simula” la propagazione delle onde elastiche sino ad ottenere i cosi’ detti sismogrammi sintetici. Le applicazioni sono molteplici, ad esempio: • Studio della sorgente sismica: si ipotizzano le caratteristiche della sorgente sismica (posizione, dimensione, meccanismo di sorgente ecc ecc) la soluzione della (O7) fornisce dei sismogrammi sintetici: il confronto tra i sintetici e le registrazioni sismiche reali fornisce preziose indicazioni sulla bontà delle nostre ipotesi sulla sorgente del terremoto. • Studio di “scenario sismico”: in questo caso note le caratteristiche di un sorgente sismica i sismogrammi “sintetici” possono essere utilizzati per “prevedere” lo scuotimento atteso per quel dato evento sismico.
Dal punto di vista matematico: è possibile ottenere una soluzione esplicita (“in forma chiusa”) ed univoca del sistema (O5) ed (O7) solo per problemi molto semplici (semispazio omogeneo ecc ecc). Nella maggior parte dei casi si devono utilizzare appropriati metodi di risoluzione numerica (differenze finite o elementi finiti) che però forniscono soluzioni approssimate. • Dal punto di vista tecnico-operativo: in generale la risoluzione del problema differenziale comporta una discretizzazione sia spaziale che temporale del sistema di equazioni. Sono quindi necessarie notevoli risorse computazionali per ottenere soluzioni matematicamente corrette. Al giorno d’oggi, utilizzando un semplice PC, è possibile effettuare simulazioni numeriche a scala regionale (100 km x 70 km) utilizzando una discretizzazione spaziale di circa 0.5 km ed una discretizzazione temporale pari a circa 0.01 sec • Dal punto di vista sismologico: l’attendibilità dei risultati delle simulazioni numeriche non dipende solo dai metodi matematici e dalle specifiche implementazioni tecniche utilizzate per risolvere il problema della propagazione ma dipende fondamentalmente dalla “qualità” dei parametri di input che si utilizzano: sorgente sismica e modello dell’interno della terra. Solo in alcuni specifici e limitati casi è disponibile un modello attendibile e dettagliato ( 0.5 km) della struttura crostale tale da ottenere sismogrammi sintetici “realistici” anche per frequenze maggiori di 1 Hz.
Per derivare le equazioni delle one P ed S ricordiamo il teorema di Helmholtz: • Sostituendo (O8) in (O6) e ricordando che: Si ottiene: • L’equazione (O9) è nella forma: Si deve avere: Onde P ed S Un campo vettoriale u può essere sempre rappresentato in termini di un potenziale scalare irrotazionale (no moto di shear) e di un potenziale vettoriale a divergenza nulla (no cambiamenti in volume).
Se poniamo: Otteniamo due forme particolari di equazioni d’onda (equazione di d’Alembert): Ovvero: • Le soluzioni di queste due equazioni sono delle onde elastiche che si propagano con velocità pari e . In virtù del fatto che > , la prima equazione rappresenta la propagazione delle onde P ( o prime) e la seconda la propagazione delle onde S (seconde). In generale un sistema di forze che agisce in un mezzo elastico emette sia onde P che S • la prima equazione rappresenta la propagazione di un disturbo dilatazionale (o irrotazionale) del materiale; la seconda, la propagazione di un’onda rotazionale (o isovolumetrica). L’onda P (onda primaria o push wave) trasporta una perturbazione di dilatazione cubica legata a variazioni di volume del materiale (componenti diagonali dello strain) mentre l’onda S (onda secondaria o shake wave) trasporta un rotore degli spostamenti ed è legata a variazioni di forma senza variazioni di volume (le componenti non diagonali dello strain) • In un continuo infinito, perfettamente elastico ed omogeneo esistono solo due tipi di onde, P ed S (Poisson 1829) che si propagano indipendentemente le une dalle altre. Nel caso di un mezzo di dimensioni finite, si ha anche la propagazione di onde superficiali.
Nell’ipotesi in cui = (coeff di Poisson = 0.25), che si può assumere con buona approssimazione per la crosta terrestre si ha: • N.B Sono i potenziali che, in assenza di forze di volume, soddisfano l’equazione d’onda non lo spostamento elastico u . Lo spostamento elastico u è la somma dello spostamento associato all’onda P più lo spostamento associato all’onda S: • La soluzione del problema della propagazione delle onde elastiche può essere quindi affrontato risolvendo prima l’equazioni d’onda relative ai potenziali e calcolando solo in un secondo tempo lo spostamento elastico. • La densità delle rocce che formano la crosta terrestre è compresa tra 2000 e 3000 kgm-3 Con = = 3 x 1010 Pa, valore medio per la crosta terrestre si ottengono valori di velocità di propagazione di alcuni chilometri al secondo.
Consideriamo un’asta “sottile” disposta lungo l’asse x1 e risolviamo l’equazione d’onda per oscillazioni longitudinali. Si ha: Imponiamo l’equilibrio lungo la direzione x1: Dove rappresenta la densità dell’asta. Sostituiamo adesso la relazione di Hooke: Equazione d’onda in una dimensione.
Definiamo c: Otteniamo l’equazione d’onda in una dimensione La soluzione generale dell’equazione (O14) è: L’equazione (O15) è chiamata soluzione di d’Alembert N.B L’equazione (O14) è stata ottenuta facendo alcune importanti assunzioni: ad esempio si è ipotizzato una distribuzione omogenea dello sforzo sulla sezione, inoltre non si sono considerate le altre componenti dello sforzo. Nell’ambito di queste approssimazioni (valide per lunghezze d’onda più grandi della dimensione dell’asta) lo spostamento è soluzione dell’equazione d’onda.
Le funzioni f e g sono funzioni arbitrarie (devono però soddisfare le condizioni al contorno del problema e la loro forma è determinata dalle condizioni iniziali). Il “disturbo elastico si propaga nella direzione + x1 (f) e - x1 (g) con velocità costante pari a c Consideriamo la funzione f(x-ct) al tempot0 e ad un tempo generico t’ in funzione di x1 e, per un certo punto lungo l’asta, ad esempio x0, la funzione f(x0 -ct) in funzione di t. La “forma” rimane costante per valori costanti di (x1 ct) e si “propaga” con velocità pari a c. L’argomento (x1 ct) viene chiamato fase Per un dato valore della fase la “forma” prende il nome di fronte d’onda. La velocità del fronte d’onda è controllata dalle caratteristiche del materiale (densità e modulo di Young). Un “sismogramma” rappresenta la registrazione della funzione u1 in una determinata posizione ad esempio x0: Variando il tempo di t e lo spazio di c t, il valore di f(x-ct) rimane immutato: tale termine rappresenta una perturbazione che si propaga nella direzione x positiva con velocità c t/ t
Riscriviamo la nostra equazione Per risolvere l’equazione differenziale (O14) si può utilizzare il metodo della separazione delle variabili: ovvero si assume che la soluzione u1 (x1,t) possa essere espressa come il prodotto di due funzioni dipendenti rispettivamente solo da x1 e t. Sostituiamo adesso l’equazione (O15) in (O14): Il termine a destra ha dipendenza dalla variabile x1 , quello a sinistra dalla variabile temporale t: affinché l’uguaglianza sia soddisfatta entrambi i membri devono essere uguali ad una costante. Poniamo questa costante pari a 2 otteniamo:
Il metodo della separazione delle variabili ci ha permesso di passare da una equazione differenziale alle derivate parziali a due equazioni differenziali ordinarie. In particolare le due equazioni rappresentano due oscillatori armonici semplici. Scriviamo le soluzioni delle due equazioni differenziali in forma esponenziale: La soluzione è il prodotto delle due soluzioni:
La soluzione O16 è una soluzione composta da termini armonici. In generale un soluzione “armonica” può essere espressa come: che rappresenta una onda monocromatica di frequenza angolare pari a che si propaga lungo la direzione x Per rappresentare un’onda monocromatica si possono utilizzare altri parametri: frequenza,periodo, lunghezza d’onda , numero d’onda • Per un definito valore di ω (frequenza angolare) i termini armonici hanno periodo T=2π/ω che rappresenta il tempo tra il passaggio di due picchi successivi dell’onda armonica ad un dato punto. Se l’onda è considerata come sola funzione di x, la lunghezza d’onda (λ) è la distanza tra due picchi con λ=cT. • Una onda sismica generalmente contiene frequenze tra 0.0003 e 100 Hz. Supponendo una velocità crostale di 5 km/s si ottengono segnali con lunghezze d’onda estremamente variabili (tra 15000 e 0.05 km) che campionano in modo estremamente differente la Terra • La rappresentazione complessa delle onde armoniche non implica che esista un’onda immaginaria: le funzioni di spostamento sono reali (complesso coniugato che elimina la parte immaginaria) • Consideriamo che l’asta non abbia proprietà uniformi: se E=E(x) e ρ= ρ(x) è possibile ottenere una soluzione approssimata (u(x1,t)) lavorando su alte frequenze (le derivate spaziali della velocità devono essere molto più piccole rispetto alle frequenza di interesse => alte frequenza e piccole variazioni di velocità)
Ricordiamo l’espressione dello spostamento u, utilizzando in teorema di Helmholtz: • E le due equazioni d’onda associate: Anche in questo caso risolviamo le equazioni O12 utilizzando il metodo della separazione delle variabili. Ad esempio, nel caso delle onde P, il potenziale scalare può essere rappresentato come il prodotto di 4 funzioni: Equazione d’onda in tre dimensioni Se sostituiamo questa soluzione nella equazione d’onda otteniamo 4 equazioni ordinarie rappresentative di un oscillatore armonico semplice.
Onda piana: in ogni istante, Φ dipende solo da x ossia è uguale in ogni punto di un piano perpendicolare all’asse x; non vi sono variazioni della quantità in esame rispetto a due coordinate: se x1 rappresenta la direzione di propagazione => ove V è la quantità in esame Questa approssimazione in sismologia è valida quando la distanza del punto misura (la stazione sismica) è molto grande rispetto alle dimensioni della sorgente: condizione di far field (dipende ovviamente dalle dimensioni della sorgente) Risolvendo le equazioni di (O17) e moltiplicando le soluzioni otteniamo: L’equazione (O18), come nel caso mono-dimensionale, assume una forma esponenziale e rappresenta un insieme di onde piane (fronte d’onda piano) che si propaga in ogni direzione del continuo. Per un dato valore della velocità di propagazione e per una data frequenza angolare si ha: L’equazione (O19) rappresenta nello spazio Cartesiano un piano definito dal vettore numero d’onda: che definisce la direzione di propagazione dell’onda essendo ortogonale al piano che definisce il fronte d’onda.
Definito il vettore numero d’onda, una forma particolare della equazione (O18) può essere scritta come: In modo del tutto analogo si può affrontare il problema della propagazione delle onde S, ottenendo per il potenziale : Per definire meglio il concetto di onda piana studiamo un caso particolare di tale onda: consideriamo un onda piana definita da un vettore numero d’onda k che giace nel piano x1x3 (fronte d’onda perpendicolare al piano x1x3). In questo caso si ha che: Il fronte d’onda è il luogo geometrico dei punti in “fase” cioè a fase costante:
Al tempo t=0 avremo (assumendo C =0): Utilizzando la condizione aggiuntiva: Definiamo i come l’angolo tra il vettore numero d’onda e l’assex3. Se x3 è un asse verticale allora l’angolo i viene anche denominato angolo di incidenza. Si ha: cioè l’equazione di una retta passante per l’origine. Si ottiene che il vettore numero d’onda k è ortogonale al fronte d’onda e k1 e k2 rappresentano le proiezioni di tale vettore sugli assi x1 e x3. N.B Il rapporto tra il seno dell’angolo i e la velocità viene chiamato parametro del raggio o “horizontal slowness” ed indicato con la lettera p. Il rapporto tra il coseno dell’angolo i e la velocità viene chiamato “vertical slowness” ed indicato con
Se manteniamo C=0 e aumentiamo t, otteniamo un set di piani paralleli, tutti caratterizzati dalla stessa fase, che corrispondono ai fronti d’onda di un’onda piana che si propaga nella direzione definita dal vettore k. Viceversa se fissiamo t=0, ricordando che: per ogni valore che può assumere la fase C si avrà un fronte d’onda definito da una retta nel piano x1x3. La soluzione (O20) rappresenta quindi un insieme infinito di onde piane (tutte le orientazioni possibili) che si propagano del mezzo tridimensionale. N.B La soluzione particolare: rappresenta una onda piana che si propaga nelle direzioni corrispondenti a +x1 e +x3
In questo caso il potenziale per le onde P si scrive come: E lo spostamento associato all’onda P è: Considerazioni La “forma funzionale” dello spostamento upè analoga a quella del potenziale anche se non è soluzione dell’equazione d’onda Lo spostamento up è tutto nel pianox1x3 (componente x2 =0) Lo spostamento up è ortogonale al fronte (in direzione k) infatti si ha che: Polarizzazione delle onde P ed S • Per studiare lo spostamento u causato dalla propagazione delle onde P ed S, consideriamo nuovamente una onda piana che si propaga nelle direzioni corrispondenti a +x1 e +x3. Sviluppando il gradiente si ottiene:
Per le onde S lo spostamento è dato da: Per un onda piana con k nel pianox1x3 le derivate parziali di i rispetto ad x2 sono nulle: sviluppando il rotore si ottiene: A questo punto riscriviamo lo spostamento totale u: Nel caso di onde longitudinali quindi il moto “particellare” è perpendicolare al fronte d’onda e quindi parallelo alla direzione di propagazione. Per la forma armonica del moto, le particelle oscillano avanti ed indietro mentre l’onda passa, comprimendo e dilatando il mezzo in modo alternato (POLARIZZAZIONE LINEARE); ONDA P: onda longitudinale Lo spostamento us si può scomporre convenzionalmente a sua volta in due componenti: SV ed SH Associamo il piano x1x2 alla superficie terrestre e quindi x3 rappresenta l’asse verticale. Le componenti di uslungo le coordinatex1 ed x3 danno origine alla componente SV (moto S nel piano x1x3) mentre la componete “fuori piano” ovvero in direzione x2 viene indicata come SH. N.B L’equazione (O23) dimostra che le onde P ed SV sono “accoppiate” (ciò avrà come conseguenza che si potrà avere una conversione tra onde P ed SV). Un onda SH invece coinvolge invece componenti diverse dello spostamento. L’approssimazione lineare delle onde assume che le onde P ed S non interferiscono (valido per stress infinitesimi) => completa separazione fra le componenti SH e le componenti P-SV.
Indichiamo con V la componente SH: Sia 1 che 2 sono soluzioni dell’equazione d’onda. Ricordiamo che: E’ facile dimostrare che anche V è soluzione dell’equazione d’onda. Si ha che: Considerazioni In generale lo spostamento u non è soluzione dell’equazione d’onda (ne usneuP) Sono i potenziali di Helmholtz che sono soluzioni dell’equazione d’onda Lo spostamento associato alle onde S può essere sempre scomposto in una componente SV ed una SH Le onde P ed SV sono accoppiate Lo spostamento associato al moto SH è soluzione dell’equazione d’onda ed è disaccoppiato dal moto SV e P (il problema della propagazione delle onde SH può essere affrontato separatamente)
Analizziamo le caratteristiche della propagazione delle onde SV. Lo spostamento associato alla componente SV dipende esclusivamente da 2: Analogamente a quanto fatto per le onde P consideriamo nuovamente una onda piana che si propaga nelle direzioni corrispondenti a +x1 e +x3. Da cui: Considerazioni Analogamente a quanto ottenuto per upanche per usv lo spostamento è nel pianox1x3 (componente x2 =0) Differentemente da up lo spostamento usv è parallelo al fronte d’onda (in direzione perpendicolare a k) infatti si ha che: L’onda S ha una polarizzazione piana ovvero il moto è confinato ad un piano perpendicolare alla direzione di propagazione => polarizzazione piana; in particolare la componente polarizzata in modo tale che le particelle è confinato in un piano orizzontale è definita SH mentre la sua omologa confinata in un piano verticale è chiamata SV; ONDA S: onda trasversale Le onde P ed S sono le uniche soluzioni possibili nel mezzo considerato
Onde S=SV+SH Onde P ed S • In virtù del differente tipo di “polarizzazione” le onde P vengono dette longitudinali le onde S trasversali
Moto di un’onda longitudinale nella direzione di propagazione
Quando si analizza un sismogramma reale (la registrazione di una componente del movimento del suolo) ci rendiamo conto che la schematizzazione estrema per adesso riprodotta analiticamente (onda P + onda S) non è assolutamente aderente alla realtà: si osservano fasi secondarie, code sismica ad alta frequenza relativamente incoerente e, soprattutto per terremoti lontani (telesismi) onde energetiche seguenti la S con polarizzazione sia SH sia P-SV con caratteristiche di dispersione (velocità variabile in funzione della frequenza). Ciò è dovuto alle ipotesi limite che abbiamo fatto (modello elastico,infinito e omogeneo):la presenza di una superficie libera, di strati a caratteristiche fisiche differenti, di eterogeneità a piccola scale permetterà di introdurre onde superficiali, i fenomeni di riflessione e rifrazione, lo scattering. Inoltre per adesso abbiamo trascurato l’effetto “sorgente” (in far field approssimabile a sorgente puntuale de istantanea): tale approssimazione, soprattutto per terremoti energetici, non è assolutamente valida e sarà necessario riconoscere all’interno del sismogramma la parte legata alla sorgente stessa