Download
1 / 33
330 likes | 455 Views
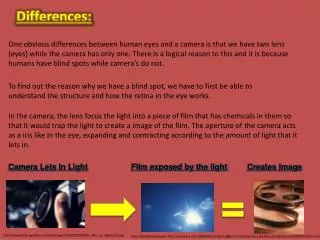
Differences measuring levels. Root mean square (RMS) For long (continuous) signals Average power delivered Peak-to-peak (pp) Extremely short signals (pulses) Integral cannot be calculated p rms = A/ √2 = 0.707A Our hearing works similarly. Localizing a sound source.

E N D
Differences measuring levels • Root mean square (RMS) • For long (continuous) signals • Average power delivered • Peak-to-peak (pp) • Extremely short signals (pulses) • Integral cannot be calculated • prms = A/√2 = 0.707A • Our hearing works similarly
Localizing a sound source • Passive listening arrays • Active sonar arrays (e.g. multibeams)
Hyperbola Fixed focus points Hyperbola - set of fixed points in a plane that the difference in distance between any point on plane and the two foci is a positive constant
Two hydrophone array Source Signal will arrive at h1 before h2 : t21 = (d2-d1)/c From this one time difference, signal could be anywhere along hyperbola
Three hydrophone line array 3 time of arrival differences 4 hyperbolas – in the dotted pair, only one is applicable (see signs) Is the signal above or below the x axis?
Left-right ambiguity • Affects line arrays • Typically those towed behind a vessel • No matter how many hydrophones added • Rearranging 3 hydrophones can eliminate ambiguity
Three hydrophone triangle array Unique solution – sound can be localized
3D localization Source is not in same plane as hydrophones 4 hydrophones (not in a line) – 2 possible points (similar to line array) 5 hydrophones – unique solution (if not in a line)
3D localization exception • 4 hydrophones in one plane (not in a line) • Near surface or seafloor • Ambiguity points occur below the surface and above it • One solution in invalid
Single hydrophone technique Direct signal and surface reflection Can determine the depth of the source If we also obtain a bottom bounce and can measure its time delay, range can also be determined Only works for very short signals (reflections do not overlap in time)
Measuring time differences • Precise measurements of small differences • Cross-correlation of one hydrophone (reference) to others • Good for complex signals (animal sounds) • Problems • Reverberation (shallow areas) • Multipath propagation • Ray bending • Noise • Rule of thumb • Accurate localization restricted to distances ~5 times the maximum size of array
Acoustic daylight • Passive sonar • Proposed by Buckingham 1992 • Noise sources • Passing ships, breaking waves, popping of bubbles, snapping shrimp • ‘Image’ objects
ADONIS • Dish focus on slight variations in the ocean's ambient noise field (lens) • 3 meters in diameter, 8-80 kHz • Reflects the collected sound • A series of 126 hydrophones • 1m resolution
Data analysis • Noise has broad frequency range • Higher frequencies only – higher spatial resolution • Adding lower frequencies increases information – acoustic ‘color’ • Spectral shape may indicate surface properties, material properties, etc. • Produce images continuously in real time at 25 Hz • Show movement • Currently only 130 pixels
ResolutionSimulations 90,000 pixels Breaking wave noise Steel sphere target 100 900
Tracking with tags • Single frequency coding (~50-100 kHz) • Repetition rate • Pulse intervals • Tags emit a series of pings in a pulse train which contains ID and error checking information (up to 192,000) • Individually track multiple fish • Time between pulse trains is varied randomly about a mean to ensure that other transmitters have a chance to be detected by the receivers
Tag ideas • Incorporation into ocean observatories • Archival tags with sensors that download data to listening stations • Tags that are also receivers, record contacts with other tags • Widely spaced ‘array’ • Presence/absence at various locations over time • For example, at marine reserve boundary • How often do fish emigrate or immigrate? • Closely spaced array • Tracking of individual fish over time
Determining source levels Au and Benoit-Bird, Nature 2003
Source level and range White curve is 20 log R + constant
Conclusions • As dolphins approach targets, sound gets louder • How to avoid hearing effects? • Bats constrict ears to hear less at close range • Human sonars apply gain function • Dolphins adapt the signal instead of the receiver • Receive constant echo from schools of fish • Do not fatigue hearing system • Reduce processing
Line array and dolphin behavior • Clicks • Pulsed, broadband signals • Function: echolocation • Interclick interval longer than two-way travel time • Function: communication • Very short interclick interval • Whistles • Tonal signals • Function: communication
dh dh t(C) t(B) t(A) S(x, y) tAB = t(A) - t(B) tCB = t(C) - t(B) C = 1533 m/s Methodology
Example of pair of signalers Whistles occur between animals spaced far (median 23 m) apart Note effective space Behavioral observations remove L/R ambiguity Lammers et al 2006
Burst pulsing pair Burst pulsing occurs at closer range (median 14 m)
Dolphin signaling conclusions • Whistles • Maintain contact between group members • Burst pulses • More intimate communication • (Consider propagation) • Regular clicks • Highly variable distances • No paired signaling • Vigilance (not feeding during study)