Download
1 / 19
190 likes | 350 Views
Motion Compensated SNR and DR Enhancement With Motion Blur Prevention Using Multicapture. Ali Ercan & Ulrich Barnhoefer. Introduction & Motivation. Single exposure trade-off High noise if short exposure time Motion blur if long exposure time. Introduction & Motivation. DR is another problem

E N D
Motion Compensated SNR and DR Enhancement With Motion Blur Prevention Using Multicapture Ali Ercan & Ulrich Barnhoefer
Introduction & Motivation • Single exposure trade-off • High noise if short exposure time • Motion blur if long exposure time Ali Ercan & Ulrich Barnhoefer
Introduction & Motivation • DR is another problem • Short exposure: Dark areas in the scene cannot be seen • Long exposure: Bright areas saturate • If both high DR scene and motion, with single capture • Motion blur free, but noisy and non-visible dark areas image • Less noisy, but motion blurred and saturated image Ali Ercan & Ulrich Barnhoefer
Introduction & Motivation • Our approach to solve these problems: • Use of multicapture combined with motion estimation • High speed is definitely needed • Normal video mode can be used – poorer results due to noise adding • CMOS imagers suitable • For a better understanding, let us introduce a simple model of CMOS imagers and describe multicapture Ali Ercan & Ulrich Barnhoefer
Sensor Model • Charge Integration • Light on photodiode generates charges • Saturation when well capacity is reached • Noise sources • (Reset noise) • Shot noise UT • Read noise VT,Vo • (Dark current) • (Fixed pattern noise) Ali Ercan & Ulrich Barnhoefer
Multicapture • Nondestructive multiple readout – Single integration • Less noise per capture compared to conventional video sensor – readout noise Ali Ercan & Ulrich Barnhoefer
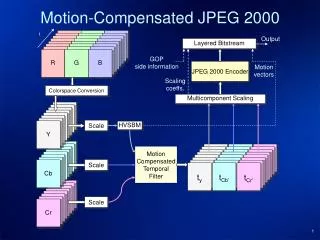
PHOTO-CURRENT ESTIMATOR CAMERA SIMULATOR SCENE MOTION ESTIMATOR FINAL IMAGE Implemented Algorithm Ali Ercan & Ulrich Barnhoefer
Camera Simulator • Multicapture, noise, ADC implemented – pixel values out Ali Ercan & Ulrich Barnhoefer
Motion Estimator • Block based motion estimation on difference frames • Search range ±1 and block size 3x3 • Fast imager (e.g. 10,000 fps available) • Search range and block size can be increased in expense of computational load • Noise suppression • Known noise levels – characterized CMOS sensor • Error = SSD + xDistance • is proportional to noise • Thanks to Sebe! Ali Ercan & Ulrich Barnhoefer
Motion Estimator • Estimated and perfect motion vectors Ali Ercan & Ulrich Barnhoefer
A B C Photocurrent Estimator Ali Ercan & Ulrich Barnhoefer
Photocurrent Estimator Ali Ercan & Ulrich Barnhoefer
Results Ali Ercan & Ulrich Barnhoefer
Results Ali Ercan & Ulrich Barnhoefer
Results Ali Ercan & Ulrich Barnhoefer
IMAGE ERRORS (STD OF ERROR IMAGE) CHECKER LENA CAMERAMAN 10 ms image 100.9 69.43 71.31 160 ms image 70.79 33.84 37.41 Const. with est. motion vectors 2.587 21.28 12.05 Const. with perfect motion vectors 2.576 17.22 3.092 Results Ali Ercan & Ulrich Barnhoefer
Conclusion • Promising results achieved with this preliminary analysis • Motion blur reduced • Noise reduced • DR increased in dark end and in bright end in special cases Ali Ercan & Ulrich Barnhoefer
Conclusion • Lots of more things to do • Use more sophisticated motion estimation algorithms • Separate motion detection from motion estimation and do estimation when detection occurs • Include extension of DR with sensor saturation • Handle the occlusions Ali Ercan & Ulrich Barnhoefer
Questions Ali Ercan & Ulrich Barnhoefer