Download
1 / 16
160 likes | 292 Views
Point Based Animation of Elastic, Plastic and Melting Objects. Matthias Müller Richard Keiser Markus Gross. Andrew Nealen Marc Alexa. Mark Pauly. ETH Zürich. TU Darmstadt. Stanford. 9555549 李盈璁. Outline. Related Work Advantages & Disadvantages Elasticity Model Simulation Loop

E N D
Point Based Animation of Elastic, Plastic and Melting Objects Matthias MüllerRichard KeiserMarkus Gross Andrew NealenMarc Alexa Mark Pauly ETH Zürich TU Darmstadt Stanford 9555549 李盈璁
Outline • Related Work • Advantages & Disadvantages • Elasticity Model • Simulation Loop • Time Integration • Surface Animation (省略) • Result
Related Work • Desbrun & Cani [95,96,99] • Physics: Smoothed Particle Hydrodynamics (SPH) • Surface: Implicit with suppressed distance blending • Tonnesen [98] • Physics: Lennard-Jones based forces • Surface: Particles with orientation
Advantages & Disadvantages • Advantages • No volumetric mesh needed • Natural adaptation to topological changes • Disadvantages • Difficulty of getting sharp fracture lines • Neighboring Phyxels are not explicitly given • Throughout this work we use Spatial Hashing [Teschner et al. 03] for fast neighbor search (when needed)
Elasticity Model • Continuum Elasticity • Elastic Strain • Estimation of Derivatives • Discrete Energy Density • Elastic Forces
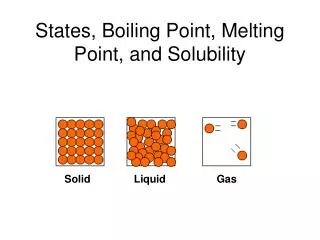
Reference configuration Deformed configuration x x+u(x) u(x) x’ u(x’) x’+u(x’) = Elastic Memory Displacement (vector) field: u(x) = [ u(x,y,z) v(x,y,z) w(x,y,z) ]T Continuum Elasticity
→ Strain depends on the spatial derivatives of u(x) u(x) Elastic Strain strain no strain Next: Compute spatial derivatives of the x component u
ui xi Dx = xij xj uj • Minimize Estimation of Derivatives - 1 • Computation of the unknown u,x, u,y and u,z at xi by Linear approximation → WLS/MLS approximation of derivatives
Linear approximation of uj as seen from xi Actual value of uj at point xj Vector of Unknown Partial Derivatives ui xi Dx = xij xj uj Estimation of Derivatives - 2 Set partial derivatives of e with respect to u,x, u,yand u,z to zero to obtain minimizer of e Use SVD for the 3x3 Matrix inversion for stability
Strain from u Discrete Energy Density -1 • Stress via material law (Hooke) • Energy density (scalar)
Discrete Energy Density -2 • Use Smoothed Particle Hydrodynamics (SPH) Method • Mass of each Phyxel mi is fix during the simulation • Distribute the mass around the Phyxel using a polynomial weighting kernel wijwith compact support • The density around Phyxel i is • From which we compute the volume vias
Estimate volume virepresented by phyxel ivia SPH • Elastic energy of phyxel i • Phyxel i and all neighbors j receive a force Elastic Forces • Depends on ui and uj of all neighbors j
External Forces (Gravity, Interaction) Computation of Strains, Stresses, Elastic Energy and per Phyxel Body Forces Verlet Integration (= new displacements) Estimation of Derivatives Simulation Loop External Forces (Gravity, Interaction) Computation of Strains, Stresses, Elastic Energy and per Phyxel Body Forces Verlet Integration (= new displacements) Estimation of Derivatives
Time Integration • Verlet (Explicit) Time Stepping • Newtons Second Law of Motion + =
Result • 彈性物體1、彈性物體2