Download
1 / 9
110 likes | 288 Views
Sensor and Vision Research for Potential Transportation Applications . Research Initiatives for Nano and Hi-tech Research January 18, 2006. Zhigang Zhu Visual Computing Laboratory Department of Computer Science City College of the City University New York. Collaboration with AFRL

E N D
Sensor and Vision Research for Potential Transportation Applications Research Initiatives for Nano and Hi-tech Research January 18, 2006 Zhigang Zhu Visual Computing Laboratory Department of Computer Science City College of the City University New York
Collaboration with AFRL Prof. Tom Huang at UIUC Prof. George Wolberg at CCNY Goal Remote sensing/hearing Multimodal signatures Challenges Noisy LDV signals Low-res, non-front faces Target detection?? Transportation??? Figure 1. Multimodal remote hearing by human and machine: system diagram Multimodal Human/Vehicle Signatures
Polytec Laser Doppler Vibrometer (LDV) OFV-505 Sensor Head, OFV-5000 Controller Tip-Tilt Stage VIB-A-P05 with Telescope FLIR ThermoVision Camera ThermoVision® A40M Infrared Camera Canon Color/IR PTZ Camera Canon VC-C50i Low Light IR PTZ Camera Other video cameras Omnidirectional cameras, stereo head Camcorders, webcam, CMOS sensors Major Sensor Acquisition
Sensor Head OFV-505 HeNe (Helium-Neon) laser, l=632.8 nm, W<1 mW OFV-SLR lens (f=30mm) 1.8 m – 200+ m “Any” surfaces, Automatic focus Controller OFV-5000 Low pass (5, 20,100 kHz), high pass (100Hz) RS-232 interface for computer control Velocity Decoder VD-06 Ranges: 1, 2, 10 and 50 mm/s/V Resolution 0.02 mm/s under 1mm/s/V range (2mv/20V) 350 kHz bandwidth analog output 24 bit, 96 kHz max. digital output on S/P-DIF interface Polytec Laser Doppler Vibrometer
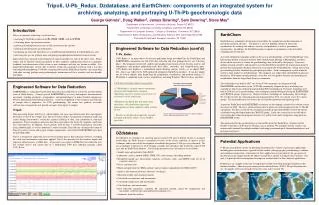
GPS By F Accumulated motion Height H dy Adaptive baseline Depth map Moving target Moving target Sy video Sx Fixed disparity Accurate depth Stereo mosaics “Right” Mosaic “Left” Mosaic Dynamic Pushbroom Stereo Mosaics Sponsored by: AFRL PIs: Zhigang Zhu, George Wolberg - CUNY City College; Robert Haralick – CUNY Graduate Center Concept: Dynamic Pushbroom Stereo Results: Content-Based 3D Mosaics Description of Research Innovative Claim Video Registration, representation and 3D static/dynamic content extractionfrom video sequences of dynamic urban scenes taken from aerial or ground vehicles. (1) Pushbroom stereo mosaics for 3D dynamic scenes (2) Natural stereo matching primitives for 3D urban scenes and moving targets (2) Content-based 3D mosaic rep for accurate 3D and motion Objectives Expected Contribution to Research Area (1) Rapid panoramic stereo mosaic construction (2) Accurate 3D reconstruction and parametric rep. (3) Robust moving target extraction and estimation An efficient and more accurate representationfor large scale scenes;A new natural matching approachfor both urban structures and moving targets
Portion of the depth map of ground and buildings; moving target are “outliers”” (small white areas) Detected moving targets – moving vehicles are identified by a 2D search in matching (from blue to red) Full Depth Map of mosaics from 1000+ frames. Sharp depth boundaries are obtained for further target recognition and motion detection Key Results Accurate 3D reconstruction and motion detection on mosaics from real world video
Car drives over a 1D array of cameras… Under-Vehicle Inspection Joint Work with UMass Computer Vision Lab Video Stereo Mosaics revealing occlusions
Gamma-Ray Cargo Inspection Images from SAlC Mobile Vehicle and Cargo Inspection System (VACIS®) 3D View 3D measurements from 2 pushbroom gamma-ray images
Novel Sensors Color, thermal, vibration Novel Algorithms Stereo mosaicing & 3D/ motion detection Emerging 3D Applications Security, surveillance & safety in transportation Summary