Download
1 / 24
240 likes | 342 Views
Bioloch studies performed in phase 1 of the project. Marc O. Schurr, Daniel Kalanovic. Section for Minimally Invasive Surgery, University of Tübingen. 1. Applicational force pattern measurement: overview. 2. Mesenteric hazards of endoscopic BIOLOCH devices. 3.

E N D
Bioloch studies performed in phase 1 of the project Marc O. Schurr, Daniel Kalanovic Section for Minimally Invasive Surgery, University of Tübingen
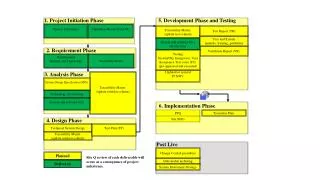
1 Applicational force pattern measurement: overview 2 Mesenteric hazards of endoscopic BIOLOCH devices 3 Colonic wall hazards of endoscopic BIOLOCH devices 4 Force pattern for walking devices 5 Force pattern for creeping devices
1 Applicational force pattern measurement: overview 2 Mesenteric hazards of endoscopic BIOLOCH devices 3 Colonic wall hazards of endoscopic BIOLOCH devices 4 Force pattern for walking devices 5 Force pattern for creeping devices
Description of force parameters of the colonic tract in interaction with endoscopic devices and techniques Different experimental series have been performed to describe the interaction of ttols and bowel. • Mesenteric hazards: • Tears • Ruptures • Parameters for • walking inside • the colon • Forces • Wall elasiticity Force pattern overview Mesenteric resistance Force / step ratio Colonic wall resistance Device advancement forces • Colonic hazards • Perforation • Paremeters for • creeping inside • the colon • With tail • Without tail
1 Applicational force pattern measurement: overview 2 Mesenteric hazards of endoscopic BIOLOCH devices 3 Colonic wall hazards of endoscopic BIOLOCH devices 4 Force pattern for walking devices 5 Force pattern for creeping devices
Mesenteric hazards. Forces resulting in mesenteric tears or perforation of the colon were studied. Mesenteric damage Bowel perforation Force measurement gauge Pushing against the bowel wall Pulling on the mesentery
Determination of threshold forces causing damage to bowel and mesentery Mesenteric lesions can be caused by excessive radial forces exerted on the bowel holding apparatus. Formation of mesenteric tears as a result of radial forces
1 Applicational force pattern measurement: overview 2 Mesenteric hazards of endoscopic BIOLOCH devices 3 Colonic wall hazards of endoscopic BIOLOCH devices 4 Force pattern for walking devices 5 Force pattern for creeping devices
Colonic wall hazards. Depending on their size, components of an endoscopic device can perforate the colonic wall at relatively low forces. This implies, that precaution has to be taken in all self-locomoting mechanisms. Perforation of colonic wall as a result of perpendicular device collision
1 Applicational force pattern measurement: overview 2 Mesenteric hazards of endoscopic BIOLOCH devices 3 Colonic wall hazards of endoscopic BIOLOCH devices 4 Force pattern for walking devices 5 Force pattern for creeping devices
Force pattern for walking mechanisms. In the measurements the force / step relationship was determined in context with bowel tissue elasticity . At what force does a step of an imaginary walking instrument get ineffective ? Bowel wall displacement
Force pattern for walking mechanisms. In the first series of experiments, only the mucosal layer was grasped („grasping leg“).
Force pattern for walking mechanisms. With mucosal attachment, grasping legs seem not to be able to transport sufficient loads (device weight and friction). Force / Step ratio, „grasping leg“, mucosal attachment
Force pattern for walking mechanisms. In the second series of experiments, also the muscular layer was grasped („grasping leg“).
Force pattern for walking mechanisms. With muscular attachment, grasping legs can transport multiples of the loads compared to mucosal attachment. Force / Step ratio, „grasping leg“, muscular attachment
Force pattern for walking mechanisms. In the third series of experiments, mucosal suction („suction leg“) was used.
Force pattern for walking mechanisms. Suction legs did not yield more holding capabilites than mucosal grasping. Force / Step ratio, „suction leg“, mucosal attachment
Force pattern for walking mechanisms. In comparison the value of mucosal involvement into the locomotion process get clear. Force / Step ratio, comparison 1. 1 cm 2. 1.5 cm 3. 2 cm 4. 2.5 cm average values of 10 experiments
1 Applicational force pattern measurement: overview 2 Mesenteric hazards of endoscopic BIOLOCH devices 3 Colonic wall hazards of endoscopic BIOLOCH devices 4 Force pattern for walking devices 5 Force pattern for creeping devices
Force pattern for creeping mechanisms. A dummy of a creeping mechanism (20 X 80 mm, 100 g) was used to study the forces involved for passage of the different segments of the colon. Set-up with animal tissue Device dummy head pulled through the bowel Two version: with and without „tail“
Forces related to the passage of a 20x80 mm device through the colon Measurement results help to understand the bowel-device interaction better. Comparison 20 x 80 mm device with and without tail 1. Anus 2. Rectum 3. Sigmoid 4. Descending colon 5. Transverse colon 6. Ascending colon average values of 20 experiments
Forces related to the passage of a 20x80 mm device through the colon Measurement results help to understand the bowel-device interaction better. 20 x 80 mm device pulled through the large bowel
Forces related to the passage of a 20x80 mm device through the colon Measurement results help to understand the bowel-device interaction better. 20 x 80 mm device with tail pulled through the large bowel
Conclusions Initial conclusions to be drawn from the applicational force measurements. 1. Hazards for the colon wall and the mesentery start at 3 - 6 N, respectively, depending on the size of the device. 2. To overcome the basic problem of inch-worm creeping devices, speed, walking may be an option. The mechanical restistance of the colonic wall allows to apply forces of about 1 N to „at ground displacement of 2 cm“, provided, that the muscular layer is involved. 3. Mechanisms, that only involve the mucosal layer may be less effective. 4. The pulling force required to move a creeping dummy object through the colon can come up to 8 N. A „tail“ may easily double the force required to move the object. Clearance of the colonic wall to minimize friction. Walking legs for locomotion.