Download
1 / 41
410 likes | 809 Views
Dynamics. Differential equation relating input torques and forces to the positions (angles) and their derivatives. Like force = mass times acceleration. Euler-Lagrange Equations. Equations of motion for unconstrained system of particles is straightforward (F = m x a).

E N D
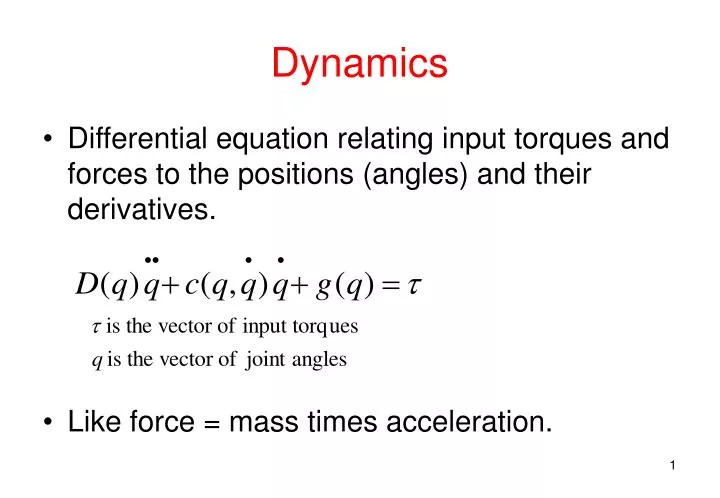
Dynamics • Differential equation relating input torques and forces to the positions (angles) and their derivatives. • Like force = mass times acceleration.
Euler-Lagrange Equations • Equations of motion for unconstrained system of particles is straightforward (F = m x a). • For a constrained system, in addition to external forces, there exist constrained forces which need to be considered for writing dynamic equations of motion. • To obtain dynamic equations of motion using Euler-Lagrange procedure we don’t have to find the constrained forces explicitly.
Nonholonomic Constraints General expression for nonholonomic constraints is: Nonholonomic constraints contain velocity terms which cannot be integrated out. A rear powered front steering vehicle
Consider a system of k particles, with corresponding coordinates, Often due to constraints or otherwise the position of k particles can be written in terms of n generalised coordinates (n < k), In this course we consider only holonomic constraints and for those constraints one can always find in principle n (n < k) independent generalised coordinates.
Virtual Displacements Define virtual displacements from above by setting dt=0. In our case dqj are independent and satisfy all the constraints. If additional constraints have to be added to dqj to finally arrive at a statement of virtual displacements which have only independent dqj, we can replace dqj with
Virtual Work Let Fi be total force on every particle, then virtual work is defined as: Constraining forces do no work when a virtual displacement, i.e., displacement satisfying all the constraints, takes place (as is the case with holonomic constraints), so in equilibrium
D’Alembert’s Principle D’Alembert’s principle states that, if one introduces a fictitious additional force, the negative of the rate of change of the momentum of particle i, then each particle will be in equilibrium.
Generalised Forces is called the i-th generalised force. The equations of motion become:
Attach a coordinate frame to the body at its centre of mass, then velocity of a point r is given by:
Frame for I and Omega The expression for the kinetic energy is the same whether we write it in body reference frame or the inertial frame but it is much easier to write I in body reference frame since it doesn’t change as the body rotates but its value in the inertial frame is always changing. So we write the angular velocity and the inertia matrix in the body reference frame.
Jacobian and velocity D(q) is a symmetric positive definite matrix and is known as the inertia matrix.
Two Link Manipulator Links are symmetric, centre of mass at half the length.
Revision Questions: • What are m1 and m1? • In which frame are vc1 and vc2 specified? • In which frame are I1 and I2 specified? • In which frame are 1 and 2 specified? • What is g? • What are rc1 andrc2?
Revision The linear velocity of a rotating vector is the cross-product of its angular velocity and the vector itself. Proof: Let be the vector rotating with an angular velocity then its derivative with time can be written as follows.
Newtonian Mechanics • Every action has an equal and opposite reaction. Thus if body 1 applies a force f and torque tau to body 2, then body 2 applies a force –f and torque of –tau to body 1. • The rate of change of linear momentum equals the total force applied to the body. • The rate of change of the angular momentum equals the total torque applied to the body.
iis the angular velocity of frame i with respect to the inertial frame expressed in frame i.