Download
1 / 24
240 likes | 267 Views
Explore the complexity of coloring problems, such as stable sets and edge coloring, in graph theory applications like scheduling aircraft, university timetables, and sports matches. Learn about methods to handle NP-hard problems, approximation algorithms, and constraints in scheduling tasks efficiently.

E N D
Tınaz Ekim Algorithmic graph theory and its applications Tınaz Ekim tinaz.ekim@epfl.ch Swiss Federal Institute of Technology Recherche Opérationnelle Sud Est (ROSE)
Tınaz Ekim Contents PART I (Applications of graph theory) • Introduction to coloring problems • Some examples of applications • Biprocessor tasks • Frequency assignment • Aircraft scheduling • University timetabling • Sports scheduling • 3D image reconstruction PART II (Generalized coloring problems) • Application : automated storage system • Related results
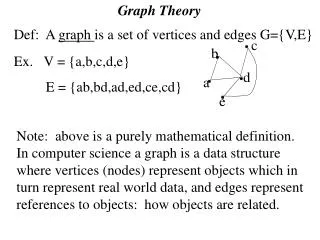
Tınaz Ekim PART I Coloring problems Stable set : set of vertices pairwise non-adjacent • Min (vertex) Coloring: Coloring vertices of a graph with a minimum number of colors ((G)) such that adjacent vertices don’t receive the same color. Min number of stable sets covering all vertices • Min (edge) Coloring: Coloring edges of a graph with a minimum number of colors ('(G)) such that adjacent egdes don’t receive the same color. Clique : set of vertices pairwise adjacent
Tınaz Ekim PART I Complexity of coloring problems Min (vertex) Coloring NP-hard [Karp, 72] Min (edge) Coloring NP-hard[Holyer, 81] NP-hard : No polynomial time exact algorithm is known, and most probably, there is no such an algorithm ! P=NP or PNP ? (1.000.000 $ question)
Tınaz Ekim PART I Methods to cope with NP-hard problems: • Restriction to particular cases • becomes polynomially solvable (give an exact algorithm), or • remains NP-hard (give the proof) • Approximation with performance guarantee • approximation ratio quality measure • -approximation algo. |A| |OPT| (1 if min) • Heuristics to obtain relatively «good» solutions in a reasonable time
Tınaz Ekim i j PART I Biprocessor tasks • n tasks • Each task executed on 2 predefined processors simultaneously • A processor can not work on 2 tasks simultaneously • Min # of periods to execute all the tasks vertex i ↔ processor i ij linked ↔ task to be processed by i and j simultaneously edge color k ↔ set of tasks to be executed at period k '(G)= min # of periods NP-hard but well approximated
Tınaz Ekim PART I Frequency assignment • n base stations • same frequency for close stations interference • Min of frequencies vertex i ↔ station i ij linked ↔ possible interference between i and j color ↔ set of stations that can have the same frequency (G) = min # of frequencies G disk unit graph 3-approximation
Tınaz Ekim j i PART I Aircraft scheduling • n flights • Time interval of flight i is (ai,bi) • Min number of aircrafts to be assigned vertex i ↔ flight i ij linked ↔ (ai,bi) overlaps (aj,bj) color ↔ set of flights scheduled to the same aircraft (G)= min number of aircrafts G interval graph polynomial
Tınaz Ekim 2 1 2 1 3 PART I Aircraft scheduling b a a b e d c e c d • Sort vertices with respect to non-decreasing right endpoints • Greedy coloring with this ordering gives optimal coloring!
Tınaz Ekim PART I Various constraints • Cardinality constraint: each color set can have at most t vertices Limited resource (machine) in scheduling problems Aircrafts: each aircraft can fly at most t times / period → becomes NP-hard in interval graphs [de Werra, Kobler, 03] • Precoloring extension: some vertices are already assigned to some colors Certain jobs are already assigned Aircrafts: some flights are already assigned to some aircrafts → becomes NP-hard in interval graphs [Biro, Hujter, Tuza, 92] • List coloring: restricted set of colors for each vertex Job that can be processed only in certain time periods, or only by certain machines Aircrafts: some flights can only be executed by some aircrafts → at least as difficult as precoloring extension
Tınaz Ekim PART I University timetabling • Students choose courses in a list (time slot + prof.) • Probability pi for course i to be opened • pi = 1 if i is a mandatory course • Objective: min of rooms • vertex i ↔ course i • ij linked ↔ i and j can not be in the same room • color ↔ set of courses assigned to the same room • Min expected # of rooms: Min Ck [1-(iCk)(1-pi)] • NP-hard even in bipartite graphs [Murat, Paschos, 2006]
Tınaz Ekim S1 1 3 1 3 1 3 S1 S2 S2 S1 2 4 2 4 2 4 S2 Day 2 Day 3 Day 1 PART I Sports scheduling 1 3 2n=4 teams vertex team edge match Edge color matches played at 1 day 2 4 Constraint: each team plays exactly twice in each of the n stadiums(except 1 team) Construction for 2n=2k[de Werra, Ekim, Raess, 05]
Tınaz Ekim PART I 3D image reconstruction • [R. Zenklusen, Master’s thesis, 2005 (OR + Computer Vision)] • Images of the surface 3D reconstruction problem • Usually reduced to 1D problem oversimplified • 3D reconstruction using graph flows[Roy, 1999]
Tınaz Ekim PART I 3D image reconstruction Approximation of the 3D image energy minimization Min cut Smoothness + light intensity + consistency energy function Capacities on the arcs
Tınaz Ekim PART I 3D image reconstruction Max flow = Min s-t cut 3D image
Tınaz Ekim PART II Generalized coloring problems • Min Cocoloring: z(G) = min (p+k such that the vertices of G can be partitioned into p cliques and k stable sets) [Lesniak,Straight 77] • Min Split-coloring: S(G) min (k : such that the vertices of G can be partitioned into k cliques and k stable sets)[Ekim, de Werra, 05] • G is a split graph if its vertex set can be partitioned into a stable set and a clique. z(G)=2 S(G)=2
Tınaz Ekim clique = decreasing subsequence 2 7 3 6 stable set= increasing subsequence 4 1 5 PART II Permutation graphs Given a permutation (N) where N=1, … ,n the permutation graph G=(V,E) corresponding to is defined as follows: V= 1, … ,n and ijE iff i < j and (i) > (j) 5 1 3 7 6 2 4
7 2 Tınaz Ekim PART II 3 6 label 1/size 4 1 5 Storage Area Storage Area 5 1 3 7 6 2 4 • No return before unloading the charge • Decreasing sizes of items Increasing labels • Min # of trips along the corridor
7 2 Tınaz Ekim PART II 3 6 Min Split-coloring 4 1 5 Storage Area Storage Area 5 1 3 7 6 2 4
7 2 Tınaz Ekim PART II 3 6 Min Split-coloring 4 1 5 Storage Area Storage Area 5 1 3 7 6 2 4
7 2 Tınaz Ekim PART II 3 6 Min Cocoloring 4 1 5 5 1 3 7 6 2 4 Storage Area
Tınaz Ekim PART II Complexity results • Min Split-coloring and Min Cocoloring NP-hard, differen-tial approximation scheme ((1-)-approximation, for all >0)[Demange, Ekim, de Werra, 06] • Min CocoloringNP-hard in permutation gr. [Wagner, 84] • Min Split-coloringNP-hard in permutation graphs but 2-approximable [Demange, Ekim, de Werra, 06] • Min l-modal NP-hard, differential approximation scheme • Min Split-coloring and Min Cocoloring P in cacti [Ekim, de Werra, 05], cographs [Demange, Ekim, de Werra, 05], in chordal graphs [Hell et al. 04]. • Min Cocoloring P in L(Bipartite), L(line-perfect graph), Min Split-coloring NP-hard in L(Bipartite) [Demange, Ekim, de Werra, 05]
Tınaz Ekim Conclusions • Several open questions related to permutations • On-line models for robotics problems • Telecommunication (network design, network security), production systems (scheduling, stock management), transportation (distribution, routing), computer vision, robotics, etc. Combinatorial optimization problems • New challenges for both theoretical and algorithmic aspects