Download
1 / 28
300 likes | 785 Views
Exploiting Homography in Camera-Projector Systems. Tal Blum Jiazhi Ou Dec 11, 2003 [Sukthankar, Stockton & Mullin. ICCV-2001]. Road Map. Introduction Projector-Camera Homography Automatic Keystone Correction Lines Detection Demo Conclusion. Introduction. The Situation:

E N D
Exploiting Homography in Camera-Projector Systems Tal Blum Jiazhi Ou Dec 11, 2003 [Sukthankar, Stockton & Mullin. ICCV-2001]
Road Map • Introduction • Projector-Camera Homography • Automatic Keystone Correction • Lines Detection • Demo • Conclusion
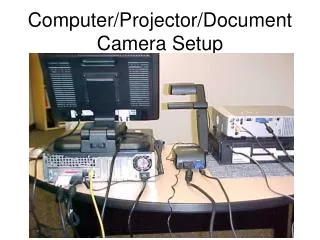
Introduction • The Situation: A presentation system with a computer and a projector • The Problem: The projected image is warped if the projector is not aligned manually • The Solution: Automatic keystone correction using a camera • The Assumption Uncalibrated camera, uncalibrated projector, we know the resolution of the screen
Projector-Camera Homography Presumption: Points on a plane (board) Given , , we want to estimate H:
Projector-Camera Homography Linear Least-Squares: Construct a 2N*9 matrix (N>=4): h equals to the eigenvector of L’*L corresponding to the smallest eigenvalue
3. Compute World-Projector Homography 4. Compute New Projected Area on Board 7. Warp Image 6. Compute Projector-Image Homography Automatic Keystone Correction Overview: 1. Compute Projector-Camera Homography 2. Compute World-Camera Homography 5. Compute World-Image Homography
P1 P4 P3 P2 Compute Projector-Camera Homography If we know p1, p2, p3, p4, we can can estimate H1:
P1 P4 P2 P3 Compute World-Camera Homography If we know p1, p2, p3, p4, we can can estimate H2:
3. Compute World-Projector Homography H3 4. Compute New Projected Area on Board Automatic Keystone Correction Overview: 1. Compute Projector-Camera Homography H1 2. Compute World-Camera Homography H2
Compute New Projected Area on Board 1. Find old projected area:
Compute New Projected Area on Board 2. Find a largest rectangle in the old projected area:
Compute World-Image Homography Now we know we can can estimate H4:
3. Compute World-Projector Homography H3 4. Compute New Projected Area on Board 7. Warp Image: For each pixel in projector, find the corresponding pixel in the image using H5 6. Compute Projector-Image Homography H5 Automatic Keystone Correction Overview: 1. Compute Projector-Camera Homography H1 2. Compute World-Camera Homography H2 5. Compute World-Image Homography H4
Road Map • Introduction • Projector-Camera Homography • Automatic Keystone Correction • Lines Detection • Demo • Conclusion
Lines Detection • We used our implementation for the lines detection • Problems in lines detection include: • Noise due to low quality camera • Need to be invariant to different room settings and different lighting conditions • The camera might be in different distances from the screen.
Lines Detection implementation • Stages • Brightness Normalization • Canny edge detection for k=1 to 4 Compute the parameter distribution Smooth the parameter space Find the point in the k’th parameter space (R_k,Theta_k) that has the maximal value and satisfy constraints. Remove the points belonging to the lines found so far from the parameter distribution end
Brightness Normalization • Adjusting the intensity by linear transformation so that the intensity range would be [0,1]
For detecting the projection coordinates • We use the difference of an image with a white projection and an image without it. • The canny image is much cleaner & easier to deal with.
Counting Over Parameter Space • Lines are represented as (R,Theta) • Count for each line how many points go through it • Smooth with a Gaussian kernel • Depends on distance from the center • Sampling problems • Lines more densely sampled near the center • Solution: Representing the points relative to the center point & Sample more densely
Choosing 4 lines • Iteratively choose 4 lines • Order the best lines by their counts • Choose the best line that satisfy constraints • Constraints include that the intersections are within the image & that each line has exactly 2 intersection with the other lines • Weighting lines with different angles differently to correct for vertical lines
Road Map • Introduction • Projector-Camera Homography • Automatic Keystone Correction • Lines Detection • Demo • Conclusion
Conclusion • We built a presentation system that corrects keystone automatically • We exploited camera-projector homography • We implemented our own line detection algorithm • The authors also use this homography to define virtual buttons on the projector screen
Thank You! A502 Newell-Simon Hall {blum,jiazhiou}@cmu.edu