Download
1 / 51
510 likes | 634 Views
TCS3 Servo System. Proposed Design. Why Model?. Meet Resolution Requirements What Resolution Encoder to use? Velocity Configuration PID Values Wind Loading Tests. Tests. 10 arcsec Offset 15 arcsec/sec Track Open/Closed Loop Response Wind Loading Frequency Sweep. JPL System. JPL Step.

E N D
TCS3 Servo System Proposed Design
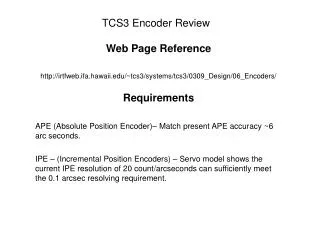
Why Model? • Meet Resolution Requirements • What Resolution Encoder to use? • Velocity Configuration • PID Values • Wind Loading Tests
Tests • 10 arcsec Offset • 15 arcsec/sec Track • Open/Closed Loop Response • Wind Loading • Frequency Sweep
Present System vs. JPL System • Added Transfer Functions • Added Quantization Blocks • Added Rate Limiter • Dual Opposing Motor Mechanical Model • Disturbance Rejection in Velocity loop • Adjust C3 and C4 gains to reflect present system components
Proposed System vs. Present • Delta Tau PMAC Configuration for PID • Use present Tachometer Loop • Adjust C4 gain for 16 bit DAC