Download
1 / 10
130 likes | 389 Views
Delta Tau Coordinate Systems and PLCs at Diamond. Overview: Delta Tau Geobrick motor controller Delta Tau Coordinate Systems and PLCs Homing PLCs Diamond standards. Matthew Pearson Controls Group, Diamond Light Source. Delta Tau Motion Control at DLS. VME PMAC Turbo 2

E N D
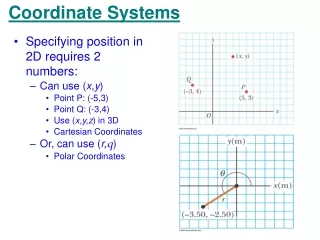
Delta Tau Coordinate Systems and PLCs at Diamond • Overview: • Delta Tau Geobrick motor controller • Delta Tau Coordinate Systems and PLCs • Homing PLCs • Diamond standards Matthew Pearson Controls Group, Diamond Light Source
Delta Tau Motion Control at DLS VME PMAC Turbo 2 + separate UMAC and Amplifiers crates Geobrick LV IMS Integrated amplifiers 4U box Ethernet comms Also have Newport XPS. 19 operational beamlines. ~1000 motorised axes
Quick look at Delta Tau Geobrick LV IMS • 16 axis PMAC • 8 axis amplifier board • Plant Interface Board • Dual Power supply • Acc910 Options Board • Software: • 16 coordinate systems • 32 PLC programs • Forward and inverse kinematics • Complex trajectories with lookahead • Position compare
PLC programs • Monitor digital inputs / set outputs • Set up motion related parameters (but not used for motion) • Provide safety checks (encoder loss) • Reset controller state • Power off amplifiers between moves • Axis Homing PLC1 is run at reset or power up. P-variables (global, general purpose) CLOSE DELETE GATHER OPEN PLC 2 CLEAR {PLC statements here} CLOSE ENABLE PLC 2
Motion programs / Coordinate systems on PMAC Can define on PMAC new coordinate systems that look (almost) the same as a standard motor. We use a customised PMAC driver to operate/readback the coordinate systems. Example: Table with 3 jacks Y1 Y2 Y3 Pitch Angle - X Height - Y • Advantages: • Synchronised motion • Pushes complexity down into • controller • Disadvantages: • Requires EPICS PMAC driver changes • Hard to maintain and debug #1 J=100 X(0.5)Y(100) Have to do this in a motion program run on PMAC
Example Coordinate system (slit gap and center) ; Change to coordinate system 2 and set relevant ; axes to use kinematics &2 #1->I ; +ve blade (B+) #2->I ; -ve blade (B-) OPEN FORWARD ; Calculate Gap and Centre ; X = Q7 = centre in mm = ({B+}+{B-})/2 ; Y = Q8 = gap in mm = {B+}-{B-} CLEAR Q7=(P1+P2)/2 Q8=P1-P2 CLOSE + similar for inverse + actual position readback PLC program + motion program to execute move Q-variables are local to coordinate systems Python script is used to generate the coordinate system and PLC at IOC build time.
Homing PLC programs • PMAC home command is #nHM (n=axis number) • We use PLCs to: • Widen soft limits when homing • Search for home flag on encoder • Drive quickly (in right direction) to home position • Move back to old position after home • Provides feedback (success, fail, following error, etc.) • 1 PLC to handle a ‘device’ – pair of slits, mirror jacks, etc. • Provides a 1-click ‘home’ button for a device. • Python script is used to generate • the PLC at IOC build time.
Diamond Standards for PMAC PLCs • Reserve PLC numbers for specific applications • PLC n uses P-variables Pn00->Pn99 • PLCs 8->16 are free for applications • PLCs 17-31 are reserved for coordinate system • position reporting (coordinate systems 2-16) • Reserved PLCs: • PLC1 – initialisation (+ enable other PLCs) • PLC2 – motion stop detection • PLC3 – automated amplifier enable • PLC4 – encoder loss • PLC6 – Geobrick amplifier reset • PLC7 – Amplifier power down between moves
Diamond Standards for PMAC Coordinate Systems • Do not use coordinate system 1 – used by Delta Tau tuning software • If need to use global P-variables, use P3200 and above. • Use certain coordinate system specific Q-variables for • Position demands (Q71-Q79) • Position readbacks via PLC (Q81-89) • Use DLS standard motion program to execute moves • Documented and forwarded on to equipment supplies • Ensures compatibility with tpmac coordinate system Asyn driver • Easier to maintain across beamlines • Minimises problems with new PMAC software
Points to note: • With coordinate systems and PLCs on PMACs system complexity • is spread out. • Possible resource issues on PMAC. • With more software running on PMAC you need to • monitor it, and we have developed a pmacStatusepics module: • CPU load and memory use. • Running PLCs • Axis and controller status words • Useful to have tools (python scripts) to semi automate • PMAC configuration backup and configuration verification. dls-pmac-analyse.py –tcpip=172.23.243.156:1025 –comparewith=myconfig.pmc