Download
1 / 83
830 likes | 995 Views
Using the Kinect. for fun and profit. About /me. Tam HANNA Director, Tamoggemon Holding k,s Runs web sites about mobile computing Writes scientific books. Agenda. Kinect – what is that? Streams Skeletons Facial tracking libfreenect OpenNI. Slide download.

E N D
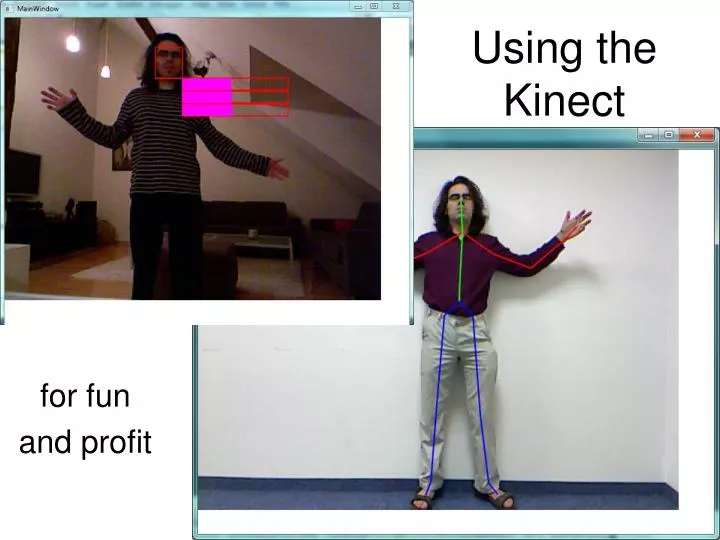
Using the Kinect for fun and profit
About /me • Tam HANNA • Director, Tamoggemon Holding k,s • Runs web sites about mobile computing • Writes scientific books
Agenda • Kinect – what is that? • Streams • Skeletons • Facial tracking • libfreenect • OpenNI
Slide download • http://www.tamoggemon.com/test/ Codemotion-Kinect.ppt • URL IS case sensitive
History - I • Depth: PrimeSense technology • Not from Redmond • First public mention: 2007 • Bill Gates, D3 conference • „Camera for game control“
Contrast detection Where does the shirt end?
History - II • 2008: Wii ships • Best-selling console of its generation • 2009: E3 conference • Announcement of „Project Natal“ • 2010: no CPU in sensor • Takes 10% of XBox 360 CPU
History - III • 4. November 2010 • First shipment • “We will sue anyone who reverse engineers“ • June 2011 • Official SDK
Kinect provides • Video stream • Depth stream • (IR stream) • Accelerometer data • Rest: computed
Kinect for XBOX Normal USB Kinect bundle MS-Fucked USB Needs PSU Kinect for Windows Costs more Legal to deploy Family tree
Kinect provides „streams“ • Repeatedly updated bitmaps • Push or Pull processes possible • Attention: processing time!!!
Color stream • Two modes • VGA@30fps • 1280x960@12fps • Simple data format • 8 bits / component • R / G / B / A components
Depth stream • Two modes • Unlimited range • Reduced range, with player indexing
Depth stream - II • 16bit words • Special encoding for limited range:
IR stream • Instead of color data • 640x480@30fps • 16bit words • IR data in 10 MSB bits
Finding the Kinect • SDK supports multiple Sensors/PC • Find one • Microsoft.Kinect.Toolkit
XAML part <Window x:Class="KinectWPFD2.MainWindow" xmlns:toolkit="clr-namespace:Microsoft.Kinect.Toolkit;assembly=Microsoft.Kinect.Toolkit" xmlns="http://schemas.microsoft.com/winfx/2006/xaml/presentation" xmlns:x="http://schemas.microsoft.com/winfx/2006/xaml" Title="MainWindow" Height="759" Width="704"> <Grid> <Image Height="480" HorizontalAlignment="Left" Name="image1" Stretch="Fill" VerticalAlignment="Top" Width="640" /> <toolkit:KinectSensorChooserUI x:Name="SensorChooserUI" IsListening="True" HorizontalAlignment="Center" VerticalAlignment="Top" /> <CheckBox Content="Overlay rendern" Height="16" HorizontalAlignment="Left" Margin="267,500,0,0" Name="ChkRender" VerticalAlignment="Top" /> </Grid> </Window>
Code - I public partial class MainWindow : Window { KinectSensor mySensor; KinectSensorChooser myChooser; public MainWindow() { InitializeComponent(); myChooser = new KinectSensorChooser(); myChooser.KinectChanged += new EventHandler<KinectChangedEventArgs>(myChooser_KinectChanged); this.SensorChooserUI.KinectSensorChooser = myChooser; myChooser.Start();
Code - II void myChooser_KinectChanged(object sender, KinectChangedEventArgs e) { if (null != e.OldSensor) { if (mySensor != null) { mySensor.Dispose(); } } if (null != e.NewSensor) { mySensor = e.NewSensor;
Initialize stream mySensor.DepthStream.Enable(DepthImageFormat.Resolution640x480Fps30); mySensor.ColorStream.Enable(ColorImageFormat.RgbResolution640x480Fps30); myArray = new short[this.mySensor.DepthStream.FramePixelDataLength]; myColorArray = new byte[this.mySensor.ColorStream.FramePixelDataLength]; mySensor.AllFramesReady += new EventHandler<AllFramesReadyEventArgs>(mySensor_AllFramesReady); try { this.mySensor.Start(); SensorChooserUI.Visibility = Visibility.Hidden; }
Process stream void mySensor_AllFramesReady(object sender, AllFramesReadyEventArgs e) { ColorImageFrame c = e.OpenColorImageFrame(); DepthImageFrame d = e.OpenDepthImageFrame(); if (c == null || d == null) return; c.CopyPixelDataTo(myColorArray); d.CopyPixelDataTo(myArray);
Problem: Calibration • Depth and Color sensors are not aligned • Position of data in array does not match
Solution • CoordinateMapper class • Maps between various frame types • Depth and Color • Skeleton and Color
On Push mode • Kinect can push data to application • Preferred mode of operation • But: sensitive to proc time • If handler takes too long -> App stops
What is tracked? • Data format • Real life coordinates • Color-Mappable
Initialize stream if (null != e.NewSensor) { mySensor = e.NewSensor; mySensor.SkeletonStream.Enable();
Get joints void mySensor_AllFramesReady(object sender, AllFramesReadyEventArgs e) { ColorImageFrame c = e.OpenColorImageFrame(); SkeletonFrame s = e.OpenSkeletonFrame(); if (c == null || s == null) return; c.CopyPixelDataTo(myColorArray); s.CopySkeletonDataTo(mySkeletonArray); foreach (Skeleton aSkeleton in mySkeletonArray) { DrawBone(aSkeleton.Joints[JointType.HandLeft], aSkeleton.Joints[JointType.WristLeft], armPen, drawingContext);
Use joints private void DrawBone(Joint jointFrom, Joint jointTo, Pen aPen, DrawingContext aContext) { if (jointFrom.TrackingState == JointTrackingState.NotTracked || jointTo.TrackingState == JointTrackingState.NotTracked) {} if (jointFrom.TrackingState == JointTrackingState.Inferred || jointTo.TrackingState == JointTrackingState.Inferred) { ColorImagePoint p1 = mySensor.CoordinateMapper.MapSkeletonPointToColorPoint(jointFrom.Position, ColorImageFormat.RgbResolution640x480Fps30); } if (jointFrom.TrackingState == JointTrackingState.Tracked || jointTo.TrackingState == JointTrackingState.Tracked)
AU‘s? • Research by Paul EKMAN • Quantify facial motion
Structure • C++ library with algorithms • Basic .net wrapper provided • Incomplete • Might change!!
Initialize face tracker myFaceTracker = new FaceTracker(mySensor);
Feed face tracker FaceTrackFrame myFrame = null; foreach (Skeleton aSkeleton in mySkeletonArray) { if (aSkeleton.TrackingState == SkeletonTrackingState.Tracked) { myFrame = myFaceTracker.Track(ColorImageFormat.RgbResolution640x480Fps30, myColorArray, DepthImageFormat.Resolution640x480Fps30, myArray, aSkeleton); if (myFrame.TrackSuccessful == true) { break; } } }
Calibration • OUCH! • Not all snouts are equal • Maximums vary
What is it • Result of Kinect hacking competition • Bundled with most Linux distributions • „Basic Kinect data parser“
Set-up • /etc/udev/rules.d/66-kinect.rules #Rules for Kinect ####################################################SYSFS{idVendor}=="045e", SYSFS{idProduct}=="02ae", MODE="0660",GROUP="video"SYSFS{idVendor}=="045e", SYSFS{idProduct}=="02ad", MODE="0660",GROUP="video"SYSFS{idVendor}=="045e", SYSFS{idProduct}=="02b0", MODE="0660",GROUP="video"### END #############################################################
Set-up II • sudo adduser $USER plugdev • sudo usermod -a -G video tamhan • tamhan@tamhan-X360:~$ freenect-glview Kinect camera test Number of devices found: 1 Could not claim interface on camera: -6 Could not open device