Download
1 / 7
70 likes | 208 Views
g. 7 . Durum değişkenleri ile kontrol. Örnek 7.1. MAK317(Problem 10-01) deki sistem. m = 0.05 k g, K = 0.0001, L = 0.01 H, R = 1 Ohm, g = 9.81 m/s 2. a=[0,0,1;0,-100,0;980,-2.8,0];b=[0;100;0]; d=[1,0,0];eig(a). Özdeğerler (Tekil noktalar, kutuplar) : 31.3050, -31.3050, -100.0000.

E N D
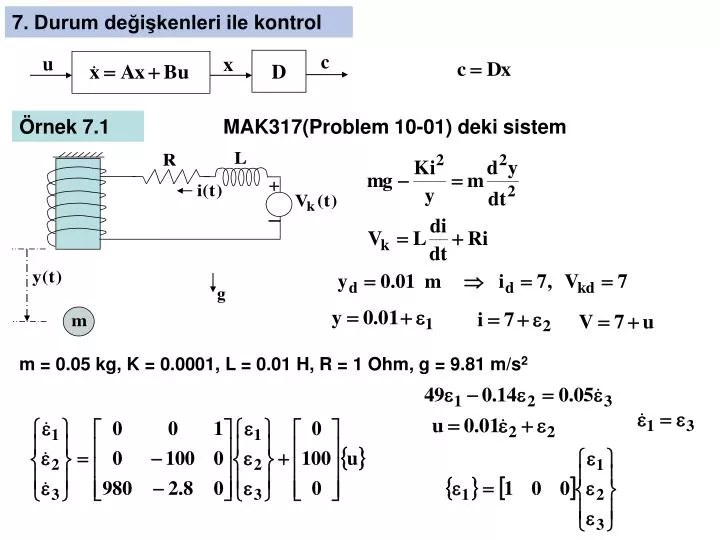
g 7. Durum değişkenleri ile kontrol Örnek 7.1 MAK317(Problem 10-01) deki sistem m = 0.05 kg, K = 0.0001, L = 0.01 H, R = 1 Ohm, g = 9.81 m/s2
a=[0,0,1;0,-100,0;980,-2.8,0];b=[0;100;0];d=[1,0,0];eig(a) Özdeğerler (Tekil noktalar, kutuplar): 31.3050, -31.3050, -100.0000 Kararsız
Kontrol edilebilirlik (Controllability) cm=ctrb(a,b);det(cm) cm: Kontrol edilebilirlik matrisi tekil değil, kontrol edilebilir Gözlemlenebilirlik (Observability) om=obsv(a,d);det(om) om: Gözlemlenebilirlik matrisi tekil değil, gözlemlenebilir MatLAB komutları ss2tf tf2ss
Durum değişkenleri geri beslemeli kontrol: p1 = -10 + 10i; p2 = -10 - 10i; p3 = -50; k = place(a,b,[p1 p2 p3]) k=[-280.7143 ,-0.3000,-7.7857] Düzgün rejim değeri: nr=-1/(d*inv(a-b*k)*b) (1 girdi)
systemc=ss(a-b*k,b,d,0); t=0:0.0064:0.64;r0=0.001; r=nr*r0*ones(size(t)); lsim(systemc,r,t)
“Observer” MatLAB da place komutu için: po1=-100;po2=-101;po3=-102; lt=place(a',d',[po1,po2,po3]);l=lt'
at=[a-b*k,b*k;zeros(size(a)),a-l*d]; bt=[b;zeros(size(b))];dt=[d,zeros(size(d))]; systemt=ss(at,bt,dt,0);lsim(systemt,r,t)