Download

1 / 31
310 likes | 325 Views
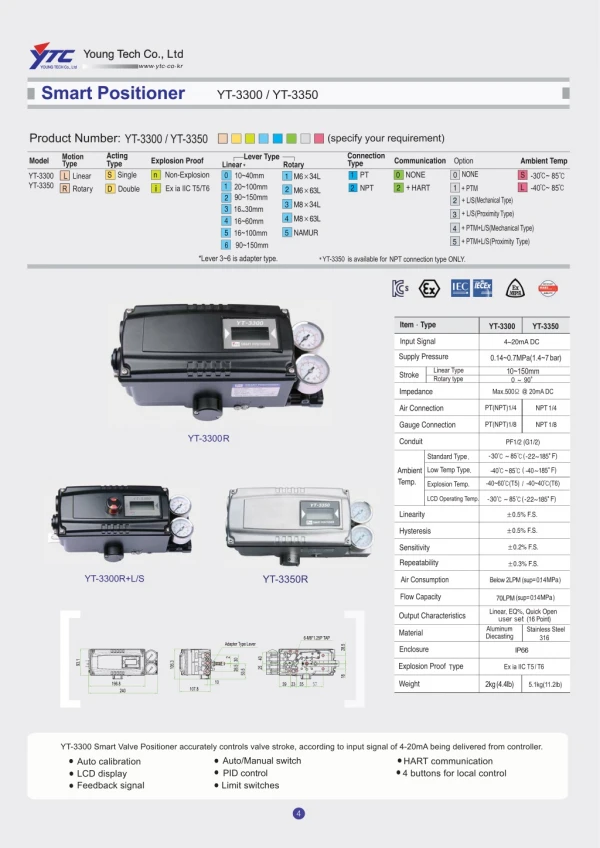
We are Authorised Stockist, Distributor, Suppliers and Traders of the following Rotork YTC range Rotork YTC SMART VALVE POSITIONER - YT-3400 SMART POSITIONER, YT-2500 SMART POSITIONER, YT-3450 SMART POSITIONER, YT-2400 SMART POSITIONER, YT-2300 SMART POSITIONER, YT-2600 SMART POSITIONER, YT-3301 SMART POSITIONER, YT-3303 SMART POSITIONER, YT-2700 SMART POSITIONER, YT-3350 SMART POSITIONER, YT-3300 SMART POSITIONER, YT-2501 SMART POSITIONER<br><br>For any Enquiry Call Us: 91-11-2201-4325, Email at : Enquiry@ytcindia.com, Our Website :- www.ytcindia.com

E N D
SMARTPOSITIONER YT-2600 SERIES PRODUCTMANUAL VERSION1.04
Contents 3.3YT-2600RInstallation………………………………………………………………………………12 3.3.1BracketInformation……………………………………………………………………...12 3.3.2InstallationSteps…………………………………………………………………………13 4.Connections……………………………………………………………………………………………..14 4.1Safety………………………………………………………………………………………………..14 4.2SupplyPressureCondition………………………………………………………………………..14 4.3PipingCondition…………………………………………………………………………………….14 4.4Connection–Actuator……………………………………………………………………………...14 4.4.1Singleactingactuator……………………………………………………………………14 4.4.2 Doubleactingactuator…………………………………………………………………..15 4.5Connection–Power………………………………………………………………………………..15 4.5.1 Safety……………………………………………………………………………………...15 4.5.2 Terminal Overview……………………………………………………………………….16 4.5.2.1InputSignalTerminal………………………………………………………….16 4.5.2.2Feedback Signal Terminal …………………………………………………… 16 4.5.2.3Limit Switch Terminal …………………………………………………………. 17 4.5.2.4Ground………………………………………………………………………….17 5.Adjustment……………………………………………………………………………………………….18 5.1LimitSwitchAdjustment……………………………………………………………………………18 YT-2600series
5.2VariableOrificeAdjustment……………………………………………………………………….185.2VariableOrificeAdjustment……………………………………………………………………….18 6.Operation…………………………………………………………………………………………………19 6.1Safety……………………………………………………………………………………………….19 6.2ButtonDescription…………………………………………………………………………………19 6.3RunMode(RUN)…………………………………………………………………………………..19 6.3.1 AutoCalibration(AUTOCAL)………………………………………………………….20 6.3.1.1 AUTO1Calibration(AUTO1)………………………………………………..20 6.3.1.2 AUTO2Calibration(AUTO2)………………………………………………..20 6.3.1.3 AUTO3Calibration(AUTO3)………………………………………………..21 6.3.2 6.3.3 ManualMode(MANUAL)………………………………………………………………21 ParameterMode(PARAM)…………………………………………………………….21 • 6.3.3.1 Dead-Zone(dEAdZONE)……………………………………………………21 • 6.3.3.2 P1Value(KP1)……………………………………………………………….22 • 6.3.3.3 D1 Value (Kd1)………………………………………………………………..22 • 6.3.3.4 P2 (KP2)andD2(Kd2)Values………………………………………………23 • 6.3.3.5 P_ (KP_) and D_ (Kd_) Values ……………………………………………… 23 6.3.3.6PT1(PT1)andPT2(PT2)Values…………………………………………...23 6.3.3.7 Period T (PERIOD T) ………………………………………………………….23 6.3.3.8AutoDZ(AUTOdZ)…………………………………………………………...23 • HandCalibrationMode (HANDCAL)………………………………………………….24 • Zero-Point(PV_ZERO)andEnd-Point(PV_END)forValves……………24 • Zero-Point(TR_ZERO)andEnd-Point (TR_END) forTransmitter ……..24 • End-Point Ratio for Valve (PE_TRIM) ………………………………………25 • Normal/ ReverseFeedbackSignal (TR_NORM/ REV)…………………25 • Normal/Reverse HARTSignal(HT_NORM/REVS)……………………26 6.3.5 ValveMode(VALVE)…………………………………………………………………….26 6.3.5.1 ActingAdjustment(ACT)……………………………………………………..26 • CharacteristicAdjustment(CHAR)………………………………………….26 • UserCharacteristics(USERSET)…………………………………………..27 • 6.3.5.4 Tight Shut Open(TSHUTOP)……………………………………………….27 • 6.3.5.5 TightShut Close (TSHUTCL) ………………………………………………. 28 • 6.3.5.6 SplitRange Mode (SPLIT) ……………………………………………………28 • 6.3.5.7 InterpolationMode(ITPOFF /ON)………………………………………….28 6.3.6 ViewMode(VIEW)……………………………………………………………………….29 • 7.ErrorandWarningCode……………………………………………………………………………….29 • 7.1ErrorCode………………………………………………………………………………………….. 29 • 7.2WarningCode………………………………………………………………………………………30 • 8.MainSoftwareMap……………………………………………………………………………………..31 YT-2600series
1.Introduction GeneralInformationfortheusers Thank you for purchasing YoungTechCo., Ltd products. Each product has been fully inspectedafterits production tooffer youthehighestqualityandreliableperformance. Pleaseread the product manual carefullyprior to installingand commissionthe product. 1.1 • For the safety, it is important to follow the instructions in the manual. Young Tech Co., Ltd will not be responsible for any damages causedbyuser’s negligence. • Themanualshouldbeprovidedtothe end-user. • Any modifications or repairs to the product may only be performed if expressed in this manual. • Themanual canbealteredor revisedwithoutanypriornotice.Anychangesin product’s specification, design, and/or any components may not be printed immediately but until the following revision of themanual. • Themanualshouldnotbeduplicatedorreproduced foranypurposewithoutprior approval fromYoungTech Co., Ltd, Gimpo-si, SouthKorea. 1.2 ManufacturerWarranty • Forthesafety,itisimportanttofollowtheinstructionsinthemanual.Manufacturerwill notbe responsible for any damagescaused by user’s negligence. • Manufacturerwillnotberesponsibleforanydamagesoraccidentsasaresultofany alterationormodificationoftheproductanditsparts.Ifanyalterationormodifications • are necessary,please contactYoungTechCo.,Ltddirectly. • Manufacturerwarrantstheproductfromthedateoforiginalpurchaseoftheproductfor one(1) year, except asotherwisestated. • Manufacturerwarrantywillnotcoverproductsthathavebeensubjectedtoabuse, • accidents, alterations, modifications, tampering, negligence, misuse, faulty installation, lack of reasonable care, repair or service in any way that is not contemplated in the documentation for the product,orif the modelor serial numberhasbeenaltered, tamperedwith,defacedorremoved;damagesthatoccursinshipment,duetoactof God,failuredue topowersurge,orcosmeticdamage.Improperorincorrectly performedmaintenance will voidthis limited warranty. • Fordetailed warranty information,pleasecontactYoungTechCo.,Ltd– South Korea. • ExplosionProofWarning • Pleaseensuretheunitisbeingusedandinstalledwithintheexplosionproofcertified environment. • YT-2600 series explosion proofgrade is Exd IICT6and can be used inzone1and 2. • Explosionprooftypeofcablesandgasketsshouldbeused,whenexplosiongasesare 1.3 YT-2600series
presentattheinstallationsite. • Powershouldbeturnedoffcompletedwhenopeningproduct’scover.Whenopening thecover, ensure that there is no powerremaining inany electrical partsnearby. • YT-2600serieshas2ports forpowerconnection. Explosionprooftypewiresand packing should be used.Blind plugisrequired whenany portis not being used. • Cablerugwithsurfaceareaofmorethan0.195mm2withM4springwashershouldbe usedto connect thepower. • Forexternalgroundterminal,cablerugwithsurfaceareaofmorethan5.5mm2should beused. • 2.ProductDescription General YT-2600seriesSmartValvePositioneraccuratelycontrolsvalvestrokeinresponsetoan 2.1 inputsignalof4-20mA fromthecontroller.Built-inmicro-processoroptimizesthe positioner’sperformanceandprovidesuniquefunctions suchasAuto-Calibration, PID Control,Alarms, and HART Protocol Communications. 2.2 MainFeaturesandFunctions • LCDdisplay enables users tomonitor thepositioner status. • Positioneroperatesnormallyduringsuddenchangesinsupplypressureand/orhigh vibrationenvironment. • Lowairconsumptionlevelandlowvoltageuse(8.5V)yieldtolowerplantoperating costs.TheYT-2600iscompatiblewith mostof controllers. • Variableorificecanbeusedtominimizethehuntingoccurrenceandoptimizeoperating conditions. • ValvesystemfeedbackisgreatlyimprovedbytheaccuracyandfastresponseoftheYT- 2600. • Differentvalvecharacteristicscanbeadjusted–Linear,QuickOpen,EqualPercentage, and Customwhich usercan make 16 pointscharacterizations. • Tight Shut–CloseandShut-Opencanbeset. • PID parameterscan be adjusted in the field without any additional communicator. • A/Mswitchcanbeusedtodirectsupplyairtotheactuatorortomanuallyoperatethe positionerorvalve. • Splitrange4-12mAor12-20mAcanbeset. YT-2600series
2.3 LabelDescription Fig.1:YT-2600BodyLabel Model: Supply: Amb.Temp.: InputSignal: ProtectionofEnclosure: ExplosionProof: Indicates the model number of the positioner. Indicatesthe supply pressurerange. Indicatesthe allowable ambienttemperature. Indicatesinput signal range. Indicatesprotectiongrade. Indicatescertifiedexplosionproofgrade. 2.4 ProductNumber YT-2600series
2.5 ProductSpecification Testedunderambienttemperatureof20’C,absolutepressureof760mmHg,andhumidityof65%.Pleasecontact YoungTechCo.,Ltdfordetailedtesting specification.* Explosionproofcertification isinprogress. YT-2600series
2.6 PartsandAssembly 2.7 ProductDimension 2.7.1 YT-2600L YT-2600series
2.7.2YT-2600R 3.Installation Safety Wheninstallingapositioner,pleaseensuretoreadandfollowsafetyinstructions. 3.1 • Anyinputorsupplypressurestovalve,actuator,and/ortootherrelateddevicesmust beturnedoff. • Use bypass valve or other supportive equipment to avoid entiresystem “shut down”. • Ensurethere is no remaining pressure in theactuator. YT-2600LInstallation YT-2600L should be installed on linear motion valves such as globe or gate type which uses spring return type diaphragm or piston actuators. Before proceeding with the installation, ensurefollowing componentsare available. 3.2 • Positionerunit • Feedbackleverandleverspring • Flangenut(bottomsideofYT-2600L) • 4pcs x hexagonalheaded bolts(M8x 1.25P) • 4pcsxM8platewasher YT-2600series
InstallationSteps • Properbracketmustbemadeinordertoadaptthepositionerontheactuatoryoke. Pleaseconsider following importantpoints when a bracket is beingdesigned. • Positioner’s feedbacklever mustbeparalleltothe groundat50%of thevalvestroke. • Feedbackleverconnectionwiththepinoftheactuatorclampshouldbeinstalledin • such a way that the valve stroke length coincides with the corresponding figure in “mm” marked on the feedback lever.Improper setting may cause poor linearity and maycreate unnecessary hunting duringthe operation. • Assemble the positioner with the bracket made in previous step by fastening the bolts.Please refer to the backside of the positioner for size of the bolts.The standard bolt size is M8 x 1.25P.Please contact Young TechCo., Ltd for other boltsizes. • Attachthepositionerwithbrackettotheactuatoryoke–DONOTTIGHTEN POSITIONERCOMPLETELY. • Connect positioner’s feedback lever to the actuator clamp.Theholegapon thefeedbackleveris 6.5mm.Theconnectionpin’souterdiameter shouldbe less than6.3mm. • Connectsupplypressuretotheactuatortemporarily.Supply enoughsupplypressureto the actuatorinorder to position the actuatorclamp at50% of the total valve stroke. • Insertconnectionpinintothefeedbacklever.Thepinshouldbeinsertedwhenthe actuator clamp is at 50% of the total valvestroke. Properway to connectfeedback lever,connectionpin,and leverspring YT-2600series
7.Check if feedback lever is parallel to the ground at 50% of the valve stroke.If it is not parallel, adjust the bracket or feedback link bar to make parallel.Improper installation may cause poorlinearity and may create unnecessaryhunting during the operation. 8.Check the valve stroke.The stroke marks are indicated on the feedback lever of the positioner.Position the connection pin at the number on the feedback lever which corresponds to the desired valve stroke. Toadjust, move the bracket, the connection pinor both. Fig.3: PinInsertionwhenvalvestrokeis 40mm(up) and is90mm(bottom) 9.After installing the positioner,operate the valve from 0% to 100% stroke by using direct air to the actuator (manual position).On both 0% and 100%, the feedback lever should not touch the lever stopper, which is located on the backside of the positioner.If the feedback lever touches the stopper, the positioner should be installed further away from theyoke. Fig.4: Feedbacklevershouldnottouchleverstopper0%~100%valvestroke. 10.Aftertheinstallation,tightenalloftheboltsonthebracket,thefeedbacklever,andthe connection pin. YT-2600series
YT-2600RInstallation YT-2600Rshouldbeinstalledonrotary motionvalve suchasballorbutterflytypewhich uses rackandpinion,scotchyokeorothertypeofactuatorswhichstemrotates90degrees. Beforeproceedingwiththe installation,ensure following components are available. 3.3 • Positionerunit • Forkleverandleverspring • Standard rotary bracket(included with thepositioner) • 4pcsxhexagonal headedbolts (M8x 1.25P) • 4pcsxM8platewasher Fig. 5:Fork lever type (left)andNAMUR lever type (right) 3.3.1Bracketinformation Standardbracket(includedwiththepositioner)containstwocomponents.Thebracketcan be used for both fork lever and NAMUR lever type.The bracket is designed to fit onto the actuatorwith20mm stem height (H).If actuator’s stem height (H) is30mmor50mm, bracket mustbe adjusted.Please referto below tablehow to adjust the bracket. YT-2600series
InstallationSteps • Pleasechecktheactuator’sstemheightandadjustthebracketby referringto the bracket table. • Attachedthebracketontotheactuator.Itisrecommendedtousespringwashersothe boltswill not be loosen fromvibration. • Set rotation position of the actuator stem at 0%. For single acting actuator, it is easy to check 0% point by supplying no pressure to the actuator.For double acting actuator, check actuator stem’s rotation direction – clockwise or counter-clockwise - by supplying pressuretotheactuator. • Install the fork lever after setting actuator’s stem at 0%.Check the actuator stem’s rotation direction – clockwise or counter-clockwise.Installation angle of the fork lever should be 45 degrees in relation to the linear shaft. For NAMUR shaft installation, the angle doesnot matter. Fig.6: Counter-clockwiseandclockwiserotation. After setting fork lever position, assemble lock nuts which are located on the bottom of the fork lever. Ensure tosettheheightof theupper forklever between 6~11mm, which is lower than the upper bracket’sheight. Attach thepositioner tothebracket. Fixthe clampingpinon themainshaft’scenterof the positioner and insert connection pin into the fork lever slot.This will lock to the fork lever spring. Setting alignment of the main shaft of the positioner and center of the actuator’s stem is very important. Poor alignment of the main shaft and the actuator’s stem decreases the positioner’s durability due to unnecessaryforceson themain shaft. Tighten thepositionerandthebracketwithhexagon-headedboltsandplatewasherafter checkingthepositioner’sposition. YT-2600series
4.Connections 4.1 Safety • Supply pressureshouldbe clean anddryair– avoidingmoisture, oilordust. • Alwaysrecommended to use air filterregulator (i.e.YT-200 series). • YoungTechCo.,Ltdhasnottestedpositioner’soperationwithanyothergases otherthan clean air.Please contactYoungTech Co., Ltdfor anyquestions. 4.2 SupplyPressureCondition • Dryairwith at least 10℃lower than ambient temperature. • Avoidfrom dustyair.Positioner’s innerfilter can only filter5 micron or larger. • Avoidoil. • Comply withANSI/ISA-57.3 1975(R1981)or ISAS7.3-1975(R1981). • Supply pressurerange is1.4 ~7 kgf/cm2(140-700 kPA) • Set airfilter regulator’spressurelevel10%higherthan actuator’sspringrangepressure. 4.3 PipingCondition • Ensureinsideof pipeis clean of obstructions. • Do not use pipeline that issqueezed orshows any type of damamges. • Pipelineshouldhavemorethan6mmofinnerdiameter(10mmouterdiameter)to maintainflowrate. • Thelengthofpipelinesystemshouldnotbeextremelylong.Longerpipelinesystem mayaffect flowrate due tothefriction insideof the pipeline. • Connection–Actuator • Singleactingactuator • Singe acting type positioneris set to use OUT1 port. OUT1 portshouldbe connectedwith supply pressureport from actuatorwhen usingsingle acting type of springreturn actuator. Fig. 7:Singeactinglinear(left)and rotary(right)typeactuator YT-2600series
4.4.2 Doubleactingactuator DoubleactingtypepositionerissettouseOUT1andOUT2port.Asinputsignalincreases, the supply pressure will besupplied through OUT1 port. • Fig. 8:Doubleacting linear (left)and rotary (right) typeactuator • Connection–Power • Safety • When installing in hazardous and explosive gas area, conduit tube or pressure-proof packing union must be used.The compound charging box should be the flameproof typeand must be sealedcompletely. • Conduitentryconnection tap is PF1/2 or G1/2. • Before connecting terminal, ensure that the power is off completely.Do not open the coverwhenthe power isstill alive. • Please usering-type rugto protect against vibrationorany other external impact. • Positioner with PTM options must be supplied 10~28V DC separately.For L/S option, separate12-24VDCmustbesupplied.Forbothoptions,itshouldnotexceed30V • DC. • Positionershouldbe grounded. • Please use twisted cable with conductor section are 1.25mm2and that is suitable for 600V (complying to the conductor table of NEC Article 310.) The outer diameter of the cable should be between 6.35 ~ 10mm.Use shield wire to protect against electro- magnetic field and noise. • Please donotinstall the cablenearhighnoiseequipments, such ashigh-capacity transformeror motor. YT-2600series
4.5.2 TerminalOverview Fig.9: PositionerTerminal • InputSignalTerminal • Open terminal cover byremovingstopperbolt using 3mmwrench. • Locate two conduit entries on the right hand bottom part of the positioner body.Please use appropriate entry by considering the operating condition.Insert cable with using properflameproof type packing union • Locateterminalofinputsignalonthe • left hand bottom side of the positioner. Insert terminal bolts into the conduit entry and secure them with (+) and (-) terminals on the plate.Make sure to tighten bolts with 1.5 Nm (15 kgf/cm2) torque.Please check the polarity of theterminals. • Close theterminal coverand fastenstopper boltusing 3mm wrench. • FeedbackSignalTerminal • Openterminalcoverandlocatefeedbacksignal terminals.<Fig.9> • Locateterminaloffeedbacksignalandconnect(+) • and(-)accordingtothepolarity. Makesureto tighten boltswith 1.5 Nm (15 kgf/cm2). • Closetheterminalcoverandfastenstopperbolt using3mm wrench. YT-2600series
4.5.2.3LimitSwitchTerminal Open terminal cover and locatelimit switchterminals.<Fig. 9> Locateterminaloflimitswitchandconnect(+)and(-)accordingtothepolarity. suretotightenbolts with 1.5 Nm (15 kgf/cm2). Close theterminal coverand fastenstopper boltusing 3mm wrench. Make • Ground • Ground mustbedonebeforeoperating the positioner. • Open terminal cover and locategroundterminal plateon the right hand bottom side of the terminal plate. The outer cable entry is located at outside of the terminal.Please makesure that the resistance isless than 100ohm. • When using external ground, use (+) screw driver to unscrew the ground bolts. Insert outside ground bolts and spring washer into ring type terminal of the ground cables and tightenthem with bolts. • When using inside ground, use 3mm wrench to loosen locking bolts of the terminal box cover. YT-2600series
5.Adjustments 5.1 LimitSwitchAdjustment HIGH variable resistor adjusts the sensing point of valve end-point. In case of Direct Actiontype,itwillsense4mApoint,andforReverseActiontype,20mAofinputsignal will be its sensing point.Upon sensing, red LED willbe lighted. LOWvariableresistoradjuststhesensingpointofvalvezero-point.IncaseofDirect Action type, it will send 20mA point, and for Reverse Action type, 4mA of input signal will be itssensing point.Upon sensing,red LED will be lighted. If V+ and COM terminals are connected, electric current can be used on limit switch.It can lightup control room’slamp or makealarm sound. If V- and COM terminals are connected, electric voltage can be used on limit switch.It canreceive signal fromacomputer. LS-ACTION dip switch enable to switch theactionbetweendirectorreverse action. By adjusting variable resistor, limit switch operation range can be set. If it is turn clockwise,rangewillbewiden;ifturned incounter-clockwise,rangewillbe shortened. As range adjusts,red LED lightwillindicate thecompletionof the adjustment. VariableOrificeAdjustment Hunting can be occurred when the actuator’svolume is too small. In order to prevent hunting,orifice canbeadjusted. Byadjustingtheorifice, theflowrateofthesupply pressure to actuatorcan beadjusted.Please use(-) driver to adjust the orifice. 5.2 Variableorificeadjustment Clockwiseturn: reducingtheflowrate Fig.10: YT-2600series
6.Operation Safety Following process will operate valve and actuator. Before proceed with any AUTO Calibration, please separate valve from the entire system, so AUTO Calibration will affectentirevalve process. 6.1 ButtonDescription Positionerhas 4 buttons, andthey enable to performvarious functions. 6.2 RunMode(RUN) Afterpowerconnectiontothepositioner,RunModewillbe appeared on positioner’s LCD screen within 6 seconds. “RUN” indicates that the positioneradjusts the valve stroke accordingto the receiving signal.There are six types of display message in “RUN”Mode. 6.3 RunPV: RunSV%: RunSVmA: RunMV: RunVel: RunErr: Process Value - valve stroke % Set Value – input signal 0~100% SetValue–inputsignal4~20mA Manipulate Valve–MotorManipulate Value(digit) Velocity– Current valve stem’svelocity (digit) Error–Difference between SV and PV (%) To change display, push <ESC> + <UP> buttons at the same time. The display will change in the order indicated above. If <ESC> + <DOWN> pushed, the order will be appeared in opposite order.By pressing <ESC>,the display will returnto“RUN” mode. YT-2600series
6.3.1 AutoCalibration(AUTOCAL) AutoCalibration(AUTOCAL)automaticallycalibratesthepositioner.“AUTOCAL”process takesabout2~3minutes,andthedurationoftheprocessvariesuponthesizeoftheactuator. Thereare3typesofAUTOCAL. Itis recommend to performAUTO2calibration forinitial positioner setting. 6.3.1.1AUTO1Calibration (AUTO1) AUTO1 changes zero and end points; however,KP,KI, KD will not be adjusted. recommended toperformAUTO1when thepositionerhasbeen setby the manufactureralready, and thefield userwantstore-calibratethepositioner. Itis valve ⇨ ⇨ ⇨ <ENTER> 6 seconds <ENTER> <ENTER> 6.3.1.2AUTO2Calibration (AUTO2) AUTO2changesalloftheparameters.ItisrecommendedtoperformAUTO2whenthe positioner hasbeen installed on the valve forthefirsttime. ⇨ ⇨ ⇨ <ENTER> 6 seconds <ENTER> <DOWN> ⇨ <ENTER> YT-2600series
6.3.1.3AUTO3Calibration (AUTO3) AUTO3changesonlythevalveparameters. ⇨ ⇨ ⇨ <ENTER> 6 seconds <DOWN> 2times <ENTER> ⇨ <ENTER> 6.3.2 ManualMode(MANUAL) Manualmodeisusedtomaneuvervalvestemmanually.During“MANUAL”,thepositioner bypassessupplyairtotheactuator. Themovementofthestrokedoesnotaffectthe positioner’s savedatavalves. ⇨ ⇨ ⇨ <ENTER> 6 seconds <DOWN> <ENTER> <UP> ⇨ ⇨ <ESC> <DOWN> • ParameterMode(PARAM) • AUTOCALoptimizesmostof thevalveactuator controlvalues.However,insome instances, hunting or oscillation may occur when the valve actuator control values are not optimized.Huntingor oscillationcan bepreventedby adjusting parameter values. • Once parameter values have been changed, the changed values are being affected as soon as you save the value.To save the changes, please ensure to press “ENTER” button.There is no need to go back to “RUN” mode after changes are being made to observethe changes. • Dead-Zone(dEAdZONE) • Dead-Zone indicates the percentage of error allowance. In case of high level of packing friction, whichmay cause hunting, creating Dead-Zone canstable thevalve operation. YT-2600series
⇨ ⇨ ⇨ <ENTER> 6 seconds <DOWN> 2times <ENTER> ⇨ ⇨ ⇨ <ESC> 3 times <ENTER> <UP>/<DOWN> <ENTER> 6.3.3.2P1value(KP1) Pvalueindicatestheratioofthecompensationsignalbasedonthepercentageoferror allowance.Asthevalueincrease,thepositionerfindsthetargetvaluequickly,butitismore likelyto have hunting. ⇨ ⇨ ⇨ <DOWN> 1time <ENTER> <ENTER> ⇨ ⇨ <ESC> 3 times <UP>/<DOWN> <ENTER> 6.3.3.3D1value(Kd1) Dvalueindicates the derivative value of thecompensation signal based on the percentage of errorallowance.Asthevalueincrease,itismorelikelytohavehunting.Asthevalue decreases,it can have poor linearity. ⇨ ⇨ ⇨ <DOWN> 2times <ENTER> <ENTER> ⇨ ⇨ <ESC> 3 times <UP>/<DOWN> <ENTER> · YT-2600series
P2(KP2)andD2(Kd2)values • P2andD2values’principlesaresameasP1andD1,butthesevaluesareapplicablefor onlywhen input signal isdecreasing. • P_(KP_)andD_(Kd_)values • P_andD_values’principlesaresameasPandD,butthesevaluesareapplicableonly whenthepositioner’s actual stroke reaches its target stroke per inputsignal. 6.3.3.6PT1(PT1) and PT2(PT2)values PTvalueindicatesminimumtimedurationofinternalsignal. signal, and PT2 is for decreasedinput signal’s PTvalues. PT1isforincreasedinput ⇨ ⇨ ⇨ <ENTER> <DOWN> 7times <ENTER> ⇨ ⇨ <ESC> 3 times <UP>/<DOWN> · <ENTER> 6.3.3.7PeriodT(PERIODT) PeriodTindicatesthepositioner’sinternalcontroltimeinterval.Asdefault,positionerwill check currentpositionrespective to currentinput signal inevery 100 msec. ⇨ ⇨ ⇨ <ENTER> <DOWN> 9times <ENTER> ⇨ ⇨ <ESC> 3 times <UP>/<DOWN> · <ENTER> 6.3.3.8AutoDZ(AUTOdZ) After the auto calibration, the positioner will create deadzone automatically.In some cases, due to the valve packing friction or to some otherreasons, deadzone may need to be increased to reduce hunting or oscillation. YT-2600series
⇨ ⇨ ⇨ <ENTER> <DOWN> 10 times <ENTER> ⇨ ⇨ <ESC> 3 times <UP>/<DOWN> · <ENTER> • HandCalibrationMode(HANDCAL) • The positioner can bemanuallycalibratedby entering intoHandCalibrationMode. • Zero-Point(PV_ZERO)and End-Point (PV_END) forValves • PZ_ZERO adjuststhe zeropointofthevalve,and PV_END adjuststhe end pointofthe valve. ⇨ ⇨ ⇨ <ENTER> 6 seconds <DOWN> 3times <ENTER> ⇨ ⇨ ⇨ <ENTER> <ESC> <UP>/<DOWN> ZeroAdjustment <ENTER> ⇨ ⇨ ⇨ <DOWN> <ENTER> <UP>/<DOWN> EndAdjustment <ENTER> ⇨ <ESC> 6.3.4.2Zero-Point(TR_ZERO)and End-Point(TR_END) forTransmitter TR_ZEROadjuststhezeropointofthetransmitter (4-20mAfeedback),andTR_ENDadjuststheend point of the transmitter (4-20mAfeedback) YT-2600series
⇨ ⇨ ⇨ <DOWN> <ENTER> <UP>/<DOWN) Match feedback signalwith 4mA ZeroAdjustment <ENTER> ⇨ ⇨ ⇨ <ESC> <DOWN> <ENTER> EndAdjustment ⇨ ⇨ <ESC> <UP>/<DOWN) Match feedback signalwith20mA <ENTER> 6.3.4.3End-PointRatioforValve(PE_TRIM) Whenreverseactingoperatingisused,End-Pointcanbeadjustedwithin10%oftotalvalve stroke, without adjusting valve’szero point. ⇨ ⇨ ⇨ <DOWN> 4times <ENTER> <ENTER> ⇨ ⇨ <ESC> 3 times <UP>/<DOWN) <ENTER> 6.3.4.4Normal /Reverse Feedback Signal(TR_NORM /REV) The feedback signal from the positioner can be viewed asnormal oras reverse. ⇨ ⇨ ⇨ <DOWN> 5times <ENTER> <ENTER> ZeroAdjustment ⇨ ⇨ ⇨ <ESC> 3 times <DOWN> <ENTER> YT-2600series
6.3.4.5Normal/Reverse HARTSignal(HT_NORM/REVS) HARTsignal fromthe positionercanbe viewed as normal orasreverse. ⇨ ⇨ ⇨ <DOWN> 6times <ENTER> <ENTER> ZeroAdjustment ⇨ ⇨ ⇨ <ESC> 3 times <DOWN> <ENTER> • Valve Mode(VALVE) • ActingAdjustment(ACT) • The positioner can be set asDirectAction(DA)or ReverseAction(RA). ⇨ ⇨ ⇨ <ENTER> 6 seconds <DOWN> 3times <ENTER> ⇨ ⇨ ⇨ <ESC> 3 times <ENTER> <UP>/<DOWN> <ENTER> 6.3.5.2CharacteristicAdjustment(CHAR) Thevalvecharacteristiccanbesetonthefield’srequirement.Thereare 3typesofcharacteristics–linear(LIN),equalpercentage(EQ),andquick open(QO). YT-2600series
⇨ ⇨ ⇨ <ENTER> <DOWN> <ENTER> ⇨ ⇨ <ESC> 3 times <UP>/<DOWN> <ENTER> 6.3.5.3User Characteristics(USER SET) Incasepositionerrequiresaspecificcharacteristic,thevalvecharacteristiccurvecanbe madeby selecting up to 16points of thecurve. ⇨ ⇨ ⇨ <ENTER> 6 seconds <DOWN> 2times <ENTER> ⇨ ⇨ ⇨ <ENTER> <UP>/<DOWN> <UP><DOWN> <ENTER> <ENTER> ⇨ ⇨ <ESC> 3 times <ENTER> Repeatstepif necessary 6.3.5.4Tight ShutOpen(TSHUTOP) TightShutOpenallowsthevalvetoopencompletelyastheinputsignalreachesaround 20mA. ⇨ ⇨ ⇨ <ENTER> 6 seconds <DOWN> 3 times <ENTER> ⇨ ⇨ <ESC> 3 times <UP>/<DOWN> <ENTER> YT-2600series
6.3.5.5TightShutClose(TSHUTCL) TightShutCloseallowsthevalvetoclosecompletelyastheinputsignalreachesaround 4mA. ⇨ ⇨ ⇨ <ENTER> 6 seconds <DOWN> 4times <ENTER> ⇨ ⇨ <ESC> 3 times <UP>/<DOWN> <ENTER> 6.3.5.6Split RangeMode(SPLIT) Thevalve canbe operatedby split range control – 4~12mAor12~20mA. ⇨ ⇨ ⇨ <ENTER> 6 seconds <DOWN> 5times <ENTER> ⇨ ⇨ <ESC> 3 times <UP>/<DOWN> <ENTER> 6.3.5.7InterpolationMode(ITPOFF/ON) Positionercancontrolthevalveaccuratelyifthefeedbackleveranglerangeiswithin designedrange. Forsomeinstance,theangleexceedsthesuggestedrangeangle. Positioner can reducetheerror through interpolation. ⇨ ⇨ ⇨ <DOWN> 8times <ENTER> <ENTER> ⇨ ⇨ <ESC> 3 times <UP>/<DOWN> <ENTER> YT-2600series
6.3.6 ViewMode(VIEW) Different informationcanbeshown on the positioner’s LCD. ➩ <DOWN> 4times ➩ <ENTER> <UP>/<DOWN> <ESC> • ErrorandWarningCode • Errorcode YT-2600series
7.2 Warningcode YT-2600series
8.MainSoftwareMap YT-2600series