Download
1 / 31
310 likes | 449 Views
Review of OS Controlled NoC from IMEC. Jim Stevens RC Reading Group 01/30/2008. Today’s Papers. Operating-system controlled network on chip. Nollet, V.; Marescaux, T.; Verkest, D. Design Automation Conference (DAC), 2004. Proceedings. 41st Volume , Issue , 2004 Page(s): 256 - 259

E N D
Review of OS Controlled NoCfrom IMEC Jim Stevens RC Reading Group 01/30/2008
Today’s Papers • Operating-system controlled network on chip.Nollet, V.; Marescaux, T.; Verkest, D. Design Automation Conference (DAC), 2004. Proceedings. 41stVolume , Issue , 2004 Page(s): 256 - 259 • Centralized run-time resource management in a network-on-chip containing reconfigurable hardware tiles. Nollet, V.; Marescaux, T.; Avasare, P.; Verkest, D.; Mignolet, J.-Y. Design, Automation and Test in Europe (DATE), 2005. Proceedings Volume , Issue , 7-11 March 2005 Page(s): 234 - 239 Vol. 1
Operating-System Controlled Network on Chip V. Nollet, T. Marescaux, and D. Verkest DAC 04
Abstract • Managing NoC is challenging • OS needs to control NoC • Tight integration allows for efficiency • OS can • Optimize communication resource usage • Reduce interference between applications
Introduction • Future systems will consist of tiles of processing elements (PE) • Tiles connected by NoC • Mapping tasks onto tiles and dynamically managing communication is extremely challenging • Goals • Ensure that compute power matches communication needs • Provide required QoS
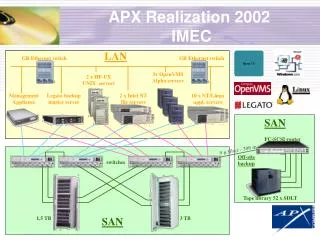
Multiprocessor Emulation • System consists of a StrongARM processor in a Compaq iPAQ PDA connected to an FPGA using iPAQ expansion port • Two NoCs built in FPGA • Packet-switched 3x3 bidirectional mesh called data NoC • Another network for OS control messages • Both networks at 30 MHz • StrongARM at 206 MHz
Data Network Interface • PEs connect to data NoC with data Network Interface Component (dNIC). • dNIC responsibilities: • Buffer I/O messages for PE • Provide higher level interface to data router • Collect statistics • Blocked message count: number of received messages that were blocked in the data router while waiting for the PE input buffer to be released. • Injection rate control mechanism: throttles rate of messages being sent from PE
Control Network Interface • Connected to control network by cNIC • Provides OS with unified view of communication resources • Collects stats from dNIC • Allows OS to: • Dynamically set routing tables • Manage injection rate of dNIC
Operating System • One PE is denoted as master • Monitors system and assigned tasks to slave PEs • Slaves contain a basic RPC-like mechanism to execute OS functions for master • Slaves can also call back to the OS using similar functionality for tasks such as synchronization
NoC Control Tools • Dynamic Statistics Collection • OS polls cNICs to get traffic stats • Collects the blocked message count to see if congestion is occuring • Dynamic Injection Rate Control • Modifies the send window of PE to reduce congestion • Setting window tasks is deterministic and fast (57 μs) • OS-Controlled Adaptive Routing • Modify routing tables to reduce congestion • Complex operation: temporary stop messages on a channel by sending sync messages, update routing tables using cNIC OS interface, and finally notify all relevant tasks to resume sending. • Non-deterministic because it depends on network traffic and complexity of table update.
Case Study • Tested system with MJPEG decoder • Consists of four tasks running on PEs • Two tasks run on StrongARM (tile 3) • Two other tasks are hardware blocks: • Huffman decoder/dequantisation • 2D-IDCT and YUV to RGB converter • Added message gen/sink modules to put traffic on the network to interfere with channel from node 7 to node 6. • OS samples cNICs every 20 ms.
Decoder Communication • Played same sequence with two different windowing techniques (window spreading and allocating continuous blocks) with no interference • Decrease the window size from 100% to ~0.02% • For window spreading, throughput of the video decoder does not decrease until effective window is less than 2% of bandwidth, half throughput occurs at 1.5% of bandwidth • For continuous allocation, half throughput occurs at 75% of bandwidth • When inference is enabled, window spreading helps reduce jitter because communication is more evenly spread.
Centralized Run-Time Resource Management in a Network-on-Chip Containing Reconfigurable Hardware Tiles V. Nollet, T. Marescaux, P. Avasare, D. Verkest, J-Y. Mignolet DATE 05
Introduction • Same assumptions and system setup as previous paper • This paper focusing on the task assignment heuristic and dynamic task migration • Claims to be first paper to address run-time task migration in an NoC context
System Description • Same as before • Task mapping heuristic must find the best PE for each task • Want to reduce internal fragmentation and optimize communication paths
Resource Management Heuristic • Requires application specification, user requirements, and current resource usages as input • Specification is given by a task graph that contains properties of each task such as computation and communication needs • User requirements given by a simple QoS specification
Heuristic Steps • Calculate requested resource load • Calculate task execution variance • Calculate task communication weight • Sort tasks according to mapping importance • Sort PEs for most important unmapped tasks • Map task to best computing resource
Backtracking • Some inputs will result in no valid mapping • Use backtracking to attempt to find another mapping • Undo previous N steps, select second best PE instead of best PE, then remap remaining N-1 steps • If fails, then try again with N+1 • If backtracking fails, options are: • Use run-time task migration • Use hierarchical configuration • Restart heuristic with reduced user requirements
RH Add-ons • For reconfigurable hardware (RH), must task into account internal fragmentation fo reconfigurable area • If both first and second best tasks are reconfigurable, then want to pick one with lowest internal fragmentation • Also consider if a regular PE could be used for this task instead of RH • Want to map only computationally intensive tasks to RH • Can also create softcore processors on RH -They refer to this as “hierarchical configuration”
Heuristic Performance • Compared to algorithm that explores full solution space for a multimedia pipeline application • Defined LIGHT, MEDIUM, and HEAVY computational loads for previous load of the platform • If more than 50% of a PE’s resources are used, then the PE is considered used, otherwise free. • Table 1 shows the success rate for the heuristic with varying number of backtracking steps with respect to searching the full mapping solution space. • Demonstrates that RH add-ons to algorithm improve performance. • Use hop-bandwidth product to show mapping quality.
Run-Time Task Migration • Goal is to move a task from source tile to destination tile • Can only migrate at predefined checkpoints in execution (we’ve seen this before) • They cite a paper to discuss moving between a PE to RH • Must assure communication consistency • Current methods (buffering or dropping) are not well suited to NoC for various reasons
Migration Process • OS issues a migration request • Wait until process reaches a checkpoint • OS does not know how long this will take • When checkpoint is reached, OS is signaled • OS tells other processes to stop sending to process • Last message sent by a process has a tag • OS migrates the process, but does not delete the original process • OS tells other processes, including the source tile, to update their routing tables (DLT) to contain the new task location • When all tagged messages have been received at the new task location, the OS tells the other processes to start sending again and it frees the original location
Migration Process for Pipelines • Based on assumption that pipelined apps have stateless points (units of work in the pipeline are independent) • To start migration, flush the pipeline with a tagged message. • Move pipeline task that needs to be migrated • Update routing tables for pipeline tasks and restart pipeline
Benchmarking Migration • Reaction time: migration request to when task is ready to migrate (checkpoint or stateless point) • Freeze time: amount of time the migrating task is suspended • If free resources are available, can start migration during reaction time for pipelines
Conclusion (Both Papers) • IMEC has developed a NoC prototype that allows the OS to control network traffic • dNIC and cNIC provide network interface to PEs and RH • OS can control injection rate, change routing tables, and migrate tasks at run-time to reduce congestion. • Static task-mapping heuristic based on specification can find efficient ways to take advantage of both communication and computation resources.