Download
1 / 48
520 likes | 823 Views
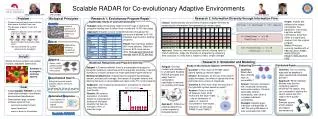
Fully Adaptive Radar SBIR Topic AF131-135. Kristine L. Bell Metron. Christopher J. Baker, Graeme E. Smith, Joel T. Johnson OSU. Phase I. FA8650-13-M-1656. Outline. Overview FAR framework Results Phase II plans. Fully Adaptive Radar Concept.

E N D
Fully Adaptive RadarSBIR Topic AF131-135 Kristine L. Bell Metron Christopher J. Baker, Graeme E. Smith, Joel T. Johnson OSU Phase I FA8650-13-M-1656
Outline • Overview • FAR framework • Results • Phase II plans
Fully Adaptive Radar Concept Standard feed-forward radar performs detection to obtain sensor measurements that are passed on to a higher-level processor (tracker) Scene Scene Delay Receiver Sensor Transmitter Detector Tracker Feed-Forward Radar Cognitive radar system (fully adaptive radar) processor includes detector and tracker, feedback to sensor AgileReceiver Sensor AgileTransmitter AgileDetector AgileTracker Sensor Processor Action Delay Controller Perception
Overview • Phase I Objectives • Develop general FAR framework that can be applied to a variety of system models and tasks • Develop performance metrics to analyze system performance • Demonstrate and analyze performance • Approach • Develop general FAR framework consisting of scene, transmitter, receiver, adaptive detector, tracker, controller • Apply to single target tracking and track initiation/termination • Demonstrate performance on three models • Distributed sensors • OSU software defined radar (SDR) • GMTI STAP system • Conduct real-time experiment on OSU SDR • Extend framework and models to handle more complex systems
Outline • Overview • FAR framework • Results • Phase II plans
Cognition Concepts • Perception-Action cycle • Stimulation by sensors • Processing to convert sensor response to perception • Further processing to interpret perception and take action • Autonomic (automatic, reflex) • Decision-driven (higher level intelligent decision-making) • Decision-making involves establishment of choices and selection of one according to a desired goal • Predictionis required for decision-making in the perception-action cycle • Implies an understandingof the situation and the effect actions may have on it • Attention directs sensing and processing resources toward relevant information • Perception, memory,andknowledge • Recognition and categorization come from perception and lead to understanding • Informed by and assist in creation of memories • Memoriesmay be from recent experiences or earlier experiences • Knowledge is a form of long-term memory
Standard Sensor/Processor System Scene Sensor Processor Delay • Model consists of state vector , observation vector , state transition (motion) model , sensor likelihood function , state estimation cost function • Goal is to find the state estimate that minimizes the conditional Bayes risk • Standard Bayes-Markov recursions predicted posterior
Cognitive Sensor/Processor System Framework • Sensor model now includes adjustable sensor parameters and sensor cost/ constraint function • Controller determines next sensor parameters by minimizing a loss function that balances state estimation cost and sensor cost • Predicted conditional Bayes risk: Bayes risk for next estimate given past data
Single Target Tracking Paradigms • Bayes-Markov information update • Detection-based: is measurement of natural sensor parameters obtained from “hard-detection” processing • Surface-based (beamformed):is processed sensor data that has been converted to a“soft-detection” surface • Sensor data-based:is sensor data. Computation of likelihood function is similar to “soft detection” processing
MAP-PF Tracker • MAP-PF tracker separates information update into two steps coupled by quadratic penalty function • Guided detection: penalty function acts like Gaussian prior to focus attention on region of natural parameter likelihood surface where the target should be • Information update: penalty function acts like Gaussian likelihood function with covariance matrix equal to inverse of Fisher information • Processing complexity similar to detection-based tracker with performance similar to sensor data-based tracker
Fully Adaptive Radar Framework • Radar system model includes state vector , sensor data , natural radar parameters (e.g. angle, range, Doppler) • Sensor consists of transmitter and receiver • Processor consists of adaptive detector and tracker • MAP-PF tracker performs guided adaptive detection using feedback from tracker to detector • Controller uses predicted conditional Bayesian information matrix (PC-BIM) Scene Sensor Processor AgileGuided Adaptive Detector AgileTransmitter AgileReceiver AgileTracker Action Delay Controller Perception
PC-BIM • Predicted conditional Bayes risk: Bayes risk for next estimate given past data. Expectation taken with respect to and conditioned on • Usually intractable to calculate. Replace with scalar function of predicted conditional Bayesian information matrix (PC-BIM) • PC-BIM calculation • Tracker performance characterized by PC-BIM • Detector performance characterized by FIM Predicted Information Matrix (PIM) Fisher Information Matrix (FIM) Expected FIM (EFIM) Predicted conditional Bayesian Information Matrix (PC-BIM)
Track Initiation and Termination • State space augmented by null (target absent) state • Density of augmented state has form • Motion model has four components
“Simplified” Recursion • Motion update • Information update • Optimum decision rule is Bayesian integrated likelihood ratio test (BLRT) • Bayesian integrated likelihood ratio (BLR)
Initialization and Thresholds • Track initiation • Assume target absent and set BLR to some initial (minimum) value • Don’t allow BLR to go below minumum • Declare target present when BLR exceeds target present threshold • Switch to track maintenance • Track maintenance and termination • Same recursions as track initiation, also calculate state estimate from posterior • Don’t allow BLR to go above maximum • Declare target absent if BLR falls below target absent threshold • Switch to track initiation • Proper operation requires
Contributions • FAR framework provides formalism and generalization to work of Haykin [Hay12] • Separates general principles (framework) from model and implementation details • Model denotes specification of state vector, sensor data, sensor parameters, motion model, measurement model, and controller optimization problem for a specific application • Implementation denotes specification of tracker type (KF-type, grid, particle filter) and details of solving controller optimization problem • Performance characterized by information matrices • Tracker performance characterized by PC-BIM • Detector performance characterized by FIM • [Hay12] S. Haykin, Y. Xue, and M. P. Setoodeh, “Cognitive radar: step toward bridging the gap between neuroscience and engineering,” Proc.IEEE, vol. 100, no. 11, pp. 3102-3130, November 2012.
Fully Adaptive Radar Framework Scene Sensor Processor AgileGuided Adaptive Detector AgileTransmitter AgileReceiver AgileTracker • Metron/OSU innovation in PC-BIM and MAP-PF tracker/detector • Perception in converting to , • Prediction in computing PC-BIM • Decision-making in choosing • Action with attention in collecting , performing guided adaptive detection to produce • Autonomic action in adaptive detection, Bayesian recursions • Understanding in computing Action Delay Controller Perception
Outline • Overview • FAR framework • Results • Distributed sensor model • OSU SDR model • GMTI STAP model • Phase II plans
FAR Demonstration on SDR Data • Previously collected data for human micro-Doppler study • Fast-time 500 MHz LFM pulses are coherently integrated to produce range samples with resolution • Slow-time PRF is adjustable • Fixed at PRF = 800 Hz in current datasets • Radar carrier frequency is selectable • fc=2.25 GHz and 8 GHz in current datasets • Target walks back and forth over a five meter range • 12,200 pulses are collected over 15.25 secs. J. Park, “Multi-Frequency Radar Signatures of Human Motion: Measurements and Models,” Ph.D. Dissertation, OSU, 2012.
Range-Doppler Surfaces vs. TimeWithout/With Clutter Nulling Dataset A fc = 8 GHz • Zero-Doppler clutter nulled out of pulse data (right panel) • Doppler processing with Hamming window • Update rate = 16 scans/sec, t=0.0625 secs. • Np = 256 pulses/CPI Movie provided separately: DSA_SR16_Np256.avi
Range-Doppler Surfaces vs. TimeWithout/With Clutter Nulling Dataset B fc = 2.25 GHz • Zero-Doppler clutter nulled out of pulse data (right panel) • Doppler processing with Hamming window • Update rate = 16 scans/sec, t=0.0625 secs. • Np = 256 pulses/CPI Movie provided separately: DSB_SR16_Np256.avi
Range vs. Time Dataset A fc = 8 GHz Closer in range → higher SNR Dataset B fc = 2.25 GHz Farther in range → lower SNR Target always visible by eye • Target disappears into noise/clutter in regions of low SNR • 0 s, 6 s and 12 s
Doppler vs. Time Dataset A fc = 8 GHz Closer in range → higher SNR Significant micro-Doppler structure Dataset B fc = 2.25 GHz Farther in range → lower SNR Less micro-Doppler structure
OSU SDR Model and Implementation • Model details are provided in [1],[2] • Theoretical model is variation on general radar model developed in [1] • Numerical values based on empirical data analysis in [2] • Implementation uses EKF tracker. Details provided in [1],[2] • Np optimization Assumed the data was Np Nrmatrix of complex pulse-range samples, and performed Doppler processing and clutter suppression to form clutter-nulled RD surface • Assumed a fixed scan interval (Δt) and that the pulses were buffered • If Δt was longer than the CPI, pulses were discarded; if shorter, then CPIs overlapped some pulses • Processing considered separate from data collection, therefore processing delay was not included • Did not perform track initiation, but “cheated” by setting the mean of the prior distribution close to the actual starting value of the target state • Adjusted Np to achieve resolution goals • K. L. Bell, C. J. Baker, G. E. Smith, and J. T. Johnson, “Fully adaptive radar,” Metron/OSU, Final Report for Contract FA8650-13-M-1656, March 2014. • K. L. Bell, J. T. Johnson, C. J. Baker, and G. E. Smith, “Fully Adaptive Radar Single Target Tracking Using the OSU Software Defined Radar System: Model and Preliminary resilts (v4),”Metron/OSU Powerpoint Summary, Contract FA8650-13-M-1656, 16 March 2014.
Resolution Goals in Controller Optimization • Sensor parameter is number of pulses, restricted to finite set of choices • The optimization problem includes “resolution goals” in range and velocity, e.g. • We predict the resolution achieved as a function of sensor parameters from the PC-CRLB, which is the inverse of the PC-BIM • FIM • SNR proportional to Np • Range FI proportional to SNR • Velocity FI proportional to SNR Np2
Single Target Tracking – Fixed Np=128 Clutter-nulled range-Doppler surface at current scan. Title gives current number of pulses and scan time Dataset A fc = 8 GHz Movie provided separately: DS_A_Np_fixed.avi
Single Target Tracking – Fixed Np=128 Clutter-nulled range-Doppler surface with penalty function at current scan. Yellow ellipse is 2σ ellipse of likelihood penalty function centered on predicted range-Doppler. Magenta ellipse is 2σ ellipse of measurement FIM/CRB centered on measurement obtained from peak of penalized RD surface. Dataset A fc = 8 GHz Movie provided separately: DS_A_Np_fixed.avi
Single Target Tracking – Fixed Np=128 2σ ellipses of predicted and posterior densities for range and velocity. Dataset A fc = 8 GHz Movie provided separately: DS_A_Np_fixed.avi
Single Target Tracking – Fixed Np=128 Range, velocity, and SNR tracks with 2σ confidence intervals, and measurement provided to tracker. Note that guided signal processing eliminates outlier estimates. Dataset A fc = 8 GHz Movie provided separately: DS_A_Np_fixed.avi
Single Target Tracking – Fixed Np=128 Number of pulses vs. time Dataset A fc = 8 GHz Movie provided separately: DS_A_Np_fixed.avi
Single Target Tracking – Fixed Np=128 Range and velocity standard deviation vs. time with performance goals Dataset A fc = 8 GHz Movie provided separately: DS_A_Np_fixed.avi
Single Target Tracking – Fixed Np=128 Dataset A fc = 8 GHz • Performance goals achieved with fixed Np Movie provided separately: DS_A_Np_fixed.avi
Single Target Tracking – FAR Np Dataset A fc = 8 GHz • Performance goals achieved with smaller Np on some scans Movie provided separately: DS_A_Np_FAR.avi
Single Target Tracking – Fixed Np=128 Dataset B fc = 2.25 GHz • Performance goals not achieved with fixed Np due to low SNR on some scans Movie provided separately: DS_B_Np_fixed.avi
Single Target Tracking – FAR Np Dataset B fc = 2.25 GHz • Performance maintained through low SNR scans by adaptively increasing Np to improve SNR Movie provided separately: DS_B_Np_FAR.avi
OSU SDR Summary • Adjusting Np to achieve a desired track resolution demonstrates that we can use FAR to make transmit and receive processing simpler when we have a strong and/or slowly moving (wrt the scan update) target • In MAP-PF tracker, penalized RD surface guides the detector to the right place • Eliminates distracting clutter and micro-Doppler sidelobes that might cause false detections • Strictness of the penalty function varies according to conditions reported by the tracker • MAP-PF tracker is a critical component that contributes to the overall performance of the FAR system • Also performed FAR optimization of PRF with Np fixed [1], [2] • Real-time experimental demonstration in progress, planned for near future
Outline • Overview • FAR framework • Results • Phase II plans
Phase II Plans • Expansion of framework • Single platform, single target • Additional tasks: feature-aided tracking, navigation • Concurrent tasks (simultaneous navigation, detection, tracking) • “Bat-like” simulation (simultaneous navigation/detection, followed by simultaneous navigation/tracking while adjusting waveform) • Single platform, multiple targets and/or objectives • Multiple cooperating platforms • Experiments • Additional SDR experiments • OSU cognitive test bed
Publications • K. L. Bell, C. J. Baker, G. E. Smith, and J. T. Johnson, “Fully adaptive radar,” Metron/OSU, Final Report for Contract FA8650-13-M-1656, March 2014. • K. L. Bell, C. J. Baker, G. E. Smith, J. T. Johnson, and M. Rangaswamy, “Fully adaptive radar for target tracking part I: single target tracking,” IEEE Radar Conf. 2014. • K. L. Bell, C. J. Baker, G. E. Smith, J. T. Johnson, and M. Rangaswamy, “Fully adaptive radar for target tracking part II: target detection and track initiation,” IEEE Radar Conf. 2014. • Journal paper combining [2] and [3] in preparation. • Journal paper with MAP-PF formulation and SDR results in preparation. • Chapter in S. Haykin’s book “Cognitive Dynamic Systems” in preparation. • Guest editor for special issue on cognitive radar in IEEE Journal of Selected Topics in Signal Processing (IEEE-JSTSP).
Detection-basedFeed-Forward Radar Tracker Scene Receiver Transmitter Signal Processor (Detector) Tracker Sensor Processor
Surface-basedFeed-Forward Radar Tracker Scene Receiver Transmitter Signal Processor (Beamformer) Tracker Sensor Processor
Sensor data-basedFeed-Forward Radar Tracker Scene Receiver Transmitter Signal Processor Tracker Sensor Processor
MAP-PF Tracker Scene Receiver Transmitter Guided Signal Processor (Detector) Tracker Sensor Processor