Download
1 / 14
140 likes | 294 Views
Początki inżynierii sterowania – okres rewolucji przemysłowej. Regulator Watt’a (1788r.). regulował prędkość maszyny parowej redukował skutki zmian obciążenia (odrzucanie zakłóceń) istotnie przyczynił się do postępu rewolucji przemysłowej).

E N D
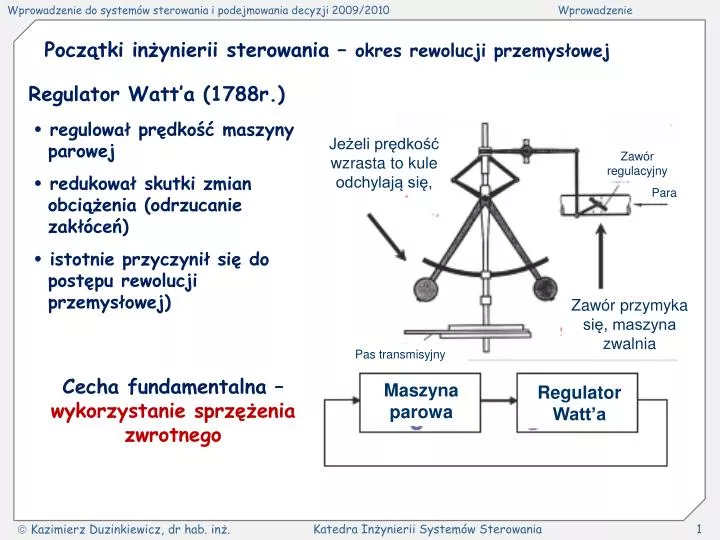
Początki inżynierii sterowania – okres rewolucji przemysłowej Regulator Watt’a (1788r.) • regulował prędkość maszyny parowej • redukował skutki zmian obciążenia (odrzucanie zakłóceń) • istotnie przyczynił się do postępu rewolucji przemysłowej) Jeżeli prędkość wzrasta to kule odchylają się, Zawór regulacyjny Para Zawór przymyka się, maszyna zwalnia Pas transmisyjny Cecha fundamentalna – wykorzystanie sprzężenia zwrotnego Maszyna parowa RegulatorWatt’a
Regulator Watt’a (1788r.) Maszyna parowa Boulton’a – Watt’a
Inżynieria sterowania dzisiaj- okres rewolucji informacyjnej Dyskusja panelowa: Przyszłościowe kierunki Sterowania, Dynamiki i Systemów Podsumowanie dyskusji opublikowane w Raporcie p.t.: Control in an Information Rich World (2002) (załączony jako materiał do wykładu)
Inżynieria sterowania – okresy pośrednie Okres II wojny światowej • Zastosowania militarne: • układy śledzenia radarowego • układy kierowania ogniem • układy autopilotów w samolotach i na okrętach • przemysłowa produkcja uranu • układy wzmacniaczy elektronicznych
Inżynieria sterowania – okresy pośrednie Okres po II wojnie światowej • Przemysłowe wykorzystanie wyników uzyskanych w zastosowaniach militarnych (wykorzystanie komputerów analogowych): • przemysł petrochemiczny • przemysł papierniczy • przemysł farmaceutyczny • przemysł metalurgiczny Zastosowania w obszarze aeronautyki (podbój kosmosu) - bodziec rozwoju nowoczesnych metod sterowania
Inżynieria sterowania – okresy pośrednie Początki wykorzystania komputerów cyfrowych Komputerowe systemy sterowania i wspomagania decyzji Dyrektor naczelny Dział Sprzedaży Dyrektor ds. produkcji Dyrektor ds. finansowych Klient Operator Laborant Sieć zakładowa Komputer administr. Stacja informacyjna Komputer laboratoryjny Stacja operatorska Stacja procesowa Stacja procesowa Stacja procesowa Mikroprocesorowy sterownik dla układów jednowymiarowych Szyna polowa Proces Sieciowe systemy zarządzania i sterowania
Międzynarodowa organizacja automatyków: IFAC –International Federation of Automatic Control
Sterowanie = Pomiar + Prawo sterowania (przetwarzanie, obliczanie) + Wykonanie (realizacja) Wykonaj Pedał gazu Zmierz Prędkościomierz Oblicz Prawo sterowania Cele: Stabilność: system utrzymuje się w pożądanym punkcie pracy (utrzymuje stałą prędkość) Jakość: system odpowiada szybko na zmiany (przyśpiesza do 6m/s) Krzepkość: system toleruje zmiany dynamiki (masa, przeszkoda, itp.)
Elementy nowoczesnego systemu sterowania Szumy Zewnętrzne zakłócenia Szumy Wyjście Aktuatory System Sensory Obiekt Komputer Sterownik Wejście operatora Obiekt: System fizyczny, aktuatory, sensory Sterownik: Mikrokomputer plus sprzętowe przetwarzanie Sprzężenie: Połączenie pomiędzy wyjściem obiektu a wejściem sterownika
Dwie metodologie sterowania Metody czarnej skrzynki: Podstawa idea: Uczenie poprzez obserwowanie lub szkolenie Przykłady: - Samostrojenie regulatorów - Adaptacyjne sieci neuronowe - Systemy rozmyte Metody oparte na modelach: Podstawa idea: użycie „dobrych” modeli (RRZw, RRCz) do analizy/projektowania Przykłady: - Regulatory optymalne - Sterowanie H - Linearyzacja przez sprzężenie zwrotne Zalety: Nie ma potrzeby złożonego modelowania lub szczegółowego rozumienia fizyki obiektu Pracuje dobrze dla sterowników zamieniających ludzkich ekspertów Zalety: Pracują dobrze dla silnie powiązanych systemów wielowymiarowych Ścisłe metody badania krzepkości i jakości (używając modelu) Wady: Brak formalnych metod badania krzepkości i jakości Nie pracują dobrze w systemach o wysokich wymaganiach jakości ze skomplikowaną dynamiką Wady: Narzędzia dostępne jedynie dla ograniczonej klasy systemów (np. liniowych, stacjonarnych) Wymagają zorientowanych na wymagania sterowania modeli; te nie są zawsze łatwe do uzyskania
Sterowanie wykorzystujące logikę rozmytą • Logika rozmyta pozwala: • Łatwo specyfikować działania sterownicze w postaci reguł • Wygładza działania sterownicze • Podstawowa idea: • Zapisz działania sterownicze w postaci reguł logiki rozmytej Klasyczna logika: JEŻLI T<68º TO Włącz grzejnik Rozmyta logika: JEŻLI Bardzo zimno TO Grzej bardziej Rozmywanie Wyostrzanie Mechanizm wnioskowania Aktuator Sensor Baza reguł Sterownik rozmyty
Zastosowania logiki rozmytej Bezpilotowy helikopter sterowany głosem (Sugeno) Harmonogramowanie pracy wind
Sterowanie wykorzystujące sztuczne sieci neuronowe • Podstawowa idea: • Zakoduj logikę sterownika używając architekturę sieci neuronowej • - Wartości wag dobierz odpowiednią metodą uczenia Wejścia Wyjścia Funkcja aktywacji Funkcja pobudzenia Wagi Zalety: Nie wymaga jawnego modelu obiektu; uczy się dynamiki obiektu z obserwacji Dobór struktury pozwala na złożone, nieliniowe działania Sensor Aktuator Sterownik neuronowy Sensor Wady: Może wymagać długiego okresu uczenia Zastosowania są na razie ograniczone
Sterowanie oparte na modelach Sterowanie klasyczne Metody w dziedzinie czasu i częstotliwości; stabilność z zapasem wzmocnienie i fazy Szczególnie użyteczne dla systemów jednowymiarowych (SISO) Ciągle jedno z głównych narzędzi inżynierów automatyków Nowoczesne sterowanie Podejście przestrzeni stanu do liniowych systemów sterowania Użyteczne zarówno dla systemów SISO jak i wielowymiarowych (MIMO) Optymalne sterowanie Znajduje sterowanie, które minimalizuje pewną funkcję celu (np. zużycie paliwa, czas, … Może być stosowane zarówno do sterowania w układzie otwartym jak i zamkniętym Krzepkie sterowanie Zapewnia stabilność przy istnieniu niepewności Sterowanie nieliniowe, sterowanie adaptacyjne, sterowanie hybrydowe