Download
1 / 27
350 likes | 1.18k Views
Senzori şi traductoare optoelectronice. Structura acestora este în ansamblu similară traductoarelor electromecanice. Deosebirea constă în faptul că detecţia se realizează cu senzori optoelectronici. Senzorul CATERPILLAR TRACTOR Acest senzor este rigidizat direct pe scula efectorului.

E N D
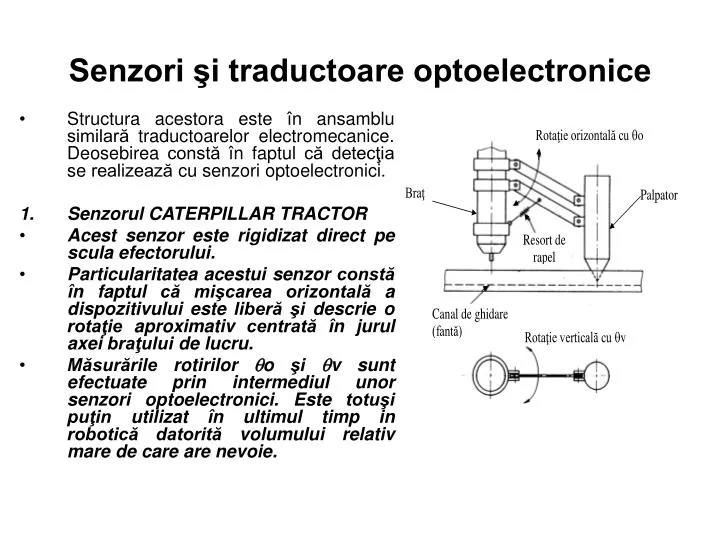
Senzori şi traductoare optoelectronice • Structura acestora este în ansamblu similară traductoarelor electromecanice. Deosebirea constă în faptul că detecţia se realizează cu senzori optoelectronici. • Senzorul CATERPILLAR TRACTOR • Acest senzor este rigidizat direct pe scula efectorului. • Particularitatea acestui senzor constă în faptul că mişcarea orizontală a dispozitivului este liberă şi descrie o rotaţie aproximativ centrată în jurul axei braţului de lucru. • Măsurările rotirilor o şi v sunt efectuate prin intermediul unor senzori optoelectronici. Este totuşi puţin utilizat în ultimul timp in robotică datorită volumului relativ mare de care are nevoie.
2. Senzorul JOZEF STEFAN • Schema de principiu a senzorului propus de Institutul Jozef Stefan este prezentată în figura alaturata. Originalitatea sa constă în dispozitivul de măsurare a deplasărilor tijei palpatoare în planul transversal al fantei de detectat. • Acest dispozitiv optoelectronic se adaptează perfect la tratarea numerică a semnalului utilizând microprocesoare. • Măsurarea deplasării se realizează prin codare directă în cod binar utilizând o mască în cod Gray. • Dispozitivul este mai puţin adaptabil la condiţiile unei atmosfere deseori ostile în care lucrează robotul (praf, proiecţii metalice, umezeală, fum, lumină parazită naturală provenind de la arcul electric, etc.). De aceia realizarea lor necesită un plus de grijă pentru a atinge o fiabilitate acceptată de cerinţele tehnologiilor robotizate.
3. Senzorul ESAB • Senzorul reprezentat în figura alaturata este bazat pe acelaşi principiu ca şi senzorul CECIL EQUIPEMENT. Astfel o tijă transmite mişcările sale unui dispozitiv adaptor cu senzori optoelectronici, ce permite măsurarea deplasărilor după patru direcţii perpendiculare. Originalitatea principială a acestui sistem este organizarea sa geometrică. • Senzorul este dispus paralel la axa braţului de lucru ce este înconjurat de un inel ce vine direct în contact cu piesa de detectat şi ale cărei mişcări sunt transmise blocului traductor optoelectronic prin intermediul tijei de legătură. Deasemenea, sistemul de codare foarte simplu realizat prin intermediul aceluiaşi bloc de traductoare, permite definirea zonelor de funcţionare normală sau defectuoasă pentru fiecare direcţie de măsurare a deplasărilor.
Se obţine un cod binar simplu definind următoarele zone de funcţionare pentru fiecare direcţie de măsurare: • Acest codaj simplu permite cunoaşterea poziţiei braţului de lucru pe diferite direcţii în raport cu poziţiile de referinţă (cod 00) ce sunt definite în funcţie de toleranţele permise pentru poziţionarea braţului în raport cu piesa. Apariţia unei zone de eroare va antrena o mişcare de corecţie după direcţia în cauză. Este evident faptul că reglajul zonei de bună funcţionare este destul de delicat, deoarece dacă această zona este prea mare, precizia de măsurare poate deveni insuficientă iar dacă este prea mică, poate antrena instabilităţi la nivelul sistemului de comandă a robotului şi deci la oscilaţii ale braţului acestuia, deranjante pentru procesul robotizat.
In raport cu precedentele sisteme descrise, acest senzor are următoarele principale avantaje: • simetria axială a senzorului, permite utilizarea lui pe roboţi până la cinci axe şi deci urmărirea unor traiectorii complexe; • eroarea de paralaxă redusă între punctul de măsură şi axa efectorului; • volum necesar montării destul de redus; • cost scăzut. Drept incoveniente mai importante se pot remarca: • codul binar simplu conduce la o complicare a sistemului de comandă; • utilizare relativ restrânsă (montaj, sudură în unghi, manipulare, etc.).
4. Senzorul SWORD şi HILL In figura de mai jos se prezintă unul din degetele unei mâini robot echipată cu un astfel de senzor. Fiecare deget dispune de 7 plăcuţe sensibile ce permit detectarea contactului dintre terminal şi obiectul vizat. Mai mult, pe faţa internă a fiecărui deget sunt plasate 18 butoane (senzori analogici) care în funcţie de efortul preluat opturează mai mult sau mai puţinfascicolul luminos emis de o diodă luminiscentă şi recepţionat de un fototranzistor. • Acest tip de senzor oferă deci informaţii relative la forţa de strângere a obiectului dar şi la forma acestuia (cei 18 senzori pot fi asimilaţi unui detector matricial).
Senzori activi • Senzorii activi au un vârf de palpare deplasabil după diverse axe cu ajutorul unuia sau mai multor sisteme de acţionare. Acestea permit escamotarea punctelor de palpare în momentul determinării caracteristicilor geometrice ale obiectului, prin palpări succesive. • Senzorul activ SAF Acest senzor este reprezentat în figura alaturata şi este constituit din elementele clasice: vârful de palpare şi traductorul de deplasare de tip potenţiometric:
Acest senzor este activ deoarece vârful de palpare este antrenat într-o mişcare de translaţie prin intermediul unui sistem de acţionare pneumatic ce-l face să atingă după dorinţă obiectul palpat. Ieşirea potenţiometrului este apoi comparată cu o valoare de referinţă. • Trebuie deasemenea efectuată şi o corecţie de poziţie prin intermediul unei mişcări de translaţie a senzorului in raport cu braţul robotului. Mişcările sistemului de acţionare pneumatic pot fi realizate periodic sau pot urmări un program apriori memorat, în funcţie de necesităţile procesului în care evoluiază robotul sau de “lecţiile” primite în perioada de “învăţare”. • Aplicaţiile mai frecvente sunt în domeniul roboţilor ce procesează piese cu forme regulate şi margini drepte.
Variante: • Senzorii ESAB şi IGM • Cei doi constructori propun un senzor similar cu palpator mecanic în contact cu obiectul vizat al cărui vârf de palpare nu este coborât în poziţia de măsurare decât în momentul măsurării. Mişcarea dute-vino a palpatorului este acţionată de un sistem pneumatic de construcţie specială. • Senzorul este plasat paralel cu braţul de lucru al robotului şi permite măsurarea deplasărilor laterale şi longitudinale ale acestuia în raport cu obiectul vizat. Utilizarea sa este limitată la măsurarea şi urmărirea anumitelor canale de ghidare sau la recalarea punctelor caracteristice ale traiectoriilor. În fotografie este reprezentat senzorul ESAB.
Senzorul JOZEF STEFAN • In cazul acestor senzori activi, poziţia tijelor de măsurare este continuu ghidata şi controlată. Robotul reproduce în fapt o traiectorie memorizată, ce urmăreşte geometria obiectului situat sub senzorul ale cărui tije sunt deplasate. • Schema de principiu a acestui senzor este prezentată în figura alaturata şi cuprinde trei grade de libertate.
Tija de măsurare a cărei extremitate este interşanjabilă, este situată în interiorul unui tub de ghidare ce-i permite deplasarea după axa OZ sub acţiunea unui micromotor. Tubul de ghidare este fixat în interiorul unui carter de protecţie a senzorului de maniera a-i permite două grade de libertate suplimentare în planul XOY. • Deplasările în planul XOY sunt realizate cu ajutorul a trei electromagneţi solidari cu tija de măsurare. Deplasările tijei după direcţiile OX, OY şi OZ sunt măsurate utilizând traductoare de tip transformator diferenţial liniar. • Comanda de lectură a informaţiilor de poziţie ale tijei este furnizată de impulsurile primite de la un senzor piezoelectric, la fiecare atingere a suprafeţei obiectului măsurat de către vârful tijei. • In comparaţie cu sistemele pasive, acest dispozitiv posedă următoarele avantaje: • mare supleţe în exploatare; • mai bună insensibilitate la starea suprafeţelor explorate. • Inconvenientele lui sunt: • fragilitate; • greutate relativ mare (ca urmare a prezenţei electromagneţilor); • sensibilitate mai redusă (datorită jocurilor mecanice şi frecărilor inerente); • lipsa unui spaţiu de acţiune în direcţia axei Z
Rezolvarea unora din aceste inconveniente este dată de o nouă soluţie a aceluiaşi constructor: • Pentru creşterea cursei tijei de măsură în axa Z, senzorul este prevăzut cu un servomotor. Electromagneţii au fost dispuşi mai jos iar măsurarea deplasărilor în planul XOY se face cu traductoare capacitive, ceia ce elimină frecările parazite. • Prezenţa traductoarelor capacitive însă, conduce inerent la noi inconveniente, legate în principal de sensibilitatea acestora la semnalele parazite din mediul industrial şi la dificultatea punerii la punct a unor sisteme de tratare a semnalului adecvate. • O variantă a acestui tip de senzor activ permite, bineînţeles că la un preţ mult mai mare, ameliorarea caracteristicilor ansamblului. In acest caz, sistemele de acţionare sunt motoare pas cu pas, ceia ce permite eliminarea traductoarelor de poziţie şi deci imunitatea la semnalele parazite. Volumul ocupat de senzor în arealul robot este însă mai mare.
Limite de utilizare • Chiar dacă sistemele descrise până acum au o larga răspândire în industrie şi permit dezvoltarea unor aplicaţii simple, ele prezintă următoarele limitări: • senzorii cu contact mecanic (cu palpare) nu funcţionează corect decât dacă ghidajul de la extremitatea tijei de palpare există şi este reprezentat geometric de manieră corectă; • senzorii mecanici sunt sensibili la uzura, la deformaţiile sau descentrările palpatorului; • palpatorii au câteodată tendinţa de a sări unele mici fante mai ales când viteza de lucru creşte; • mecanismele senzorului pot fi uneori voluminoase şi îngrămădite pe braţul robotului, ceia ce face imposibil accesul acestuia în anumite spaţii de lucru; • palpatorii în contact au o rezoluţie limitată. De exemplu, într-o aplicaţie simplă de sudură în unghi, un palpator cu extremitatea rotundă va produce o eroare variabilă cu orientarea pieselor de asamblat. Pentru canale cu margini drepte, poziţia orizontală va depinde de lărgimea acestora. Formele vârfului palpatorului adaptate contextului măsurare-lucru, pot fi selecţionate în aplicaţii particulare, pentru minimizarea dar nu anularea acestor erori. • un palpator prin contact pasiv este incapabil să determine variaţiile geometrice ale obiectului vizat. Sistemele active permit rezolvarea acestei probleme dar complexitatea şi fragilitatea ce le caracterizează le fac prohibitive pentru unele aplicaţii industriale; • unele aplicaţii (operaţiile de sudură multipas, manipularea multicomponent, etc.), prezintă o problemă particulară dificilă pentru palpatoarele mecanice, deoarece referinţa de ghidare fie se distruge fie se modifică în mod continuu (unghiuri, traiectorii, suprafeţe de urmărit, etc.).
Senzori tactili matriciali • Având în vedere limitările în utilizare ale palpatorilor ce au fost menţionate anterior, se caută: • obţinerea unor senzori care să ofere informaţii pe cât posibil libere de starea suprafeţei obiectului • obţinerea unor senzori care să ofere informaţii relative la cât mai multe caracteristici geometrice ale obiectului. • Pentru aceasta s-au luat în considerare unele organizări matriciale ale palpatorilor elementari. • Senzorul rezultat denumit şi senzor matricial, mai poate fi încă găsit în literatura de specialitate şi sub denumirea de senzor cu tije multiple
a). Senzorul matricial PAGE • Acest dispozitiv permite recunoaşterea formei obiectelor în trei dimensiuni. Schema lui de principiu este reprezentat în figura de mai jos. • Se compune dintr-un grup de şapte tije în linie în faţa cărora este dispus un alt grup de două tije. Măsurarea deplasărilor acestor tije se realizează cu traductoare tensometrice rezistive sau uneori cu senzori inductivi incrementali de abatere de înălţime
Utilizarea acestor senzori este limitată totuşi la aplicaţii specifice. Acest lucru se datorează în principal fiabilităţii relativ reduse, posibilităţilor de blocare şi uzurii tijelor. • O variantă a acestui senzor, utilizează pentru aprecierea deplasării tijelor, traductoare inductive toroidale. De această dată, însă, senzorul este sensibil direct la variaţiile de deplasare şi nu la deplasarea însăşi. Pentru aceasta, suportul sistemului senzorial este supus unor deplasări incrementale. La fiecare pas, fie se estimează variaţia deplasării tijelor palpatoare, fie se contorizează numărul tijelor ce au suferit o anumită deplasare dZi. • Se poate astfel obţine practic o “tomografie” incrementală a obiectului vizat, “recunoaşterea formei” acestuia fiind mai aproape de cea reală, la fiecare pas. • Contorizarea incrementală a imaginii permite sistemului de comandă să “judece” din timp modul de acţiune la pasul următor (forţa de strângere, sensul deplasării, etc.).
b). Senzorul matricial PERUCHON • Este format dintr-o matrice pătrată de 64 de tije a căror poziţie se măsoară utilizând senzori inductivi tip transformator diferenţial liniar. Fiecare tijă este solidară cu un miez din material magnetic de mare permiabilitate ce culisează în interiorul unui tub pe care sunt plasate bobinele transformatorului liniar. A fost dezvoltat în ideia utilizării lui mai ales în aplicaţiile submarine. c). Senzorul GOLDGEWICHT • Prezintă particularitatea că furnizează direct informaţii binare. Numai tijele ce sunt solicitate de obiect, închid un circuit la trecerea printr-o matrice de ploturi metalice fixate pe un suport izolant. Se obţine astfel o amprentă numerică pe un singur bit a obiectului vizat.
d) Senzorul TAKEDA • A fost gândit pentru o mână a unui manipulator cu două degete. Se compune din două matrici de 8x10 tije situate pe fiecare dintre degete. Cunoscând în prealabil deschiderea degetelor, prin evaluarea poziţiilor tijelor din planurile paralele YOZ ale celor două matrici, se poate reconstrui relieful obiectului vizat. e) Senzorul matricial binar TRANSENZORY DEVICE • Este un senzor integrat binar de presiune. Semnalul binar se obţine la orice trecere într-un sens sau în altul a unui prag foarte mic de presiune. Prin cuplarea mai multor astfel de senzori se obţin matrici ce permit ridicarea după dorinţă a profilului obiectelor vizate. Sunt utilizate mai ales la sistemele de prehensiune de precizie sau al verificarea parametrilor sistemelor de detecţie.
f) Senzorul piezoelectric MATSUBARA • Senzorii sensibili la presiune, sunt elemente piezoelectrice înglobate într-un polimer elastic. Deşi aparent efortul se distribuie în planul XOY, în realitate el evoluiază în plane paralele succesive cu acesta, obţinându-se amprenta de volum a obiectului vizat. • Explorarea diverselor plane paralele este posibilă prin aprecierea unor praguri Vp, prestabilite ale tensiunii culese la ieşirea senzorului.
Pielea artificială • Denumirea de piele artificială desemnează o clasă de senzori tactili constituiţi dintr-un strat conductor suplu, a cărui rezistenţă variază în funcţie de presiunea aplicată pe acesta. • Caracteristica esenţială a acestor dispozitive este structura compactă a părţii conductoare. Materialele utilizate pentru stratul conductor sunt de două tipuri: • elastomeri (cauciuc natural sau sintetic) în care s-au înglobat diverse particule conductoare (grafit, carbon activ, pulberi metalice, etc.); • pâsle din fibre conductoare (fibre de carbon). • Principiul senzorului constă în creşterea rezistenţei materialului la aplicarea presiunii prin modificarea densităţii contactelor între elementele conductoare, deci a conductivităţii. • Dacă se plasează materialul între doi electrozi aflaţi sub o tensiune oarecare V, curentul I ce traversează ansamblul creşte odată cu forţa de apăsare pe el. Deci variaţia curentului I este o imagine a presiunii exercitate.
Problema conceperii unui senzor tactil utilizând unul sau altul dintre materiale constă în discretizarea presiunii pe suprafaţa superioară, pentru a evidenţia fie conductivitatea transversală, fie conductivitatea longitudinală a materialului conductor. a) Senzor tactil tip “piele artificială” cu conductivitate transversalăElastomerul sau pâsla conductoare, metalizat pe o faţă, este plasat pe un suport conductor pus la potenţialul masei în care sunt izolaţi mai mulţi electrozi de măsură. Suprafaţa metalizată este alimentată la o sursă de tensiune. O parte a curentului creat prin modificarea rezistenţei locale se pierde prin suportul conductor care prezintă o impedanţă mică în raport cu electrozii. Curentul cules de la fiecare electrod, este prelucrat apoi individual.
Această metodă de măsură individuală a curentului, prezintă încovenientul unui sistem de prelucrare a semnalului foarte complicat (câte un circuit pentru fiecare electrod). • O soluţie a acestei probleme o oferă varianta prezentată în figura de pe slide-ul urmator. Aceasta este o structură matricială în cruce constituită din benzi conductoare paralele (linii) pe o faţă şi alte benzi conductoare (coloane) pe cealaltă faţă, orientate la 900. Astfel, la un moment dat este alimentată o singură linie. • Coloana de măsură este conectată la masă prin intermediul unei rezistenţe parte a unui potenţiometru prin care se culege informaţia de măsurare. Aceasta este legată la rezistenţa zonei conductoare situată la intersecţia liniei de alimentare şi a coloanei de măsură.
Aplicarea potenţialului coloanei de măsură la toate celelalte linii şi coloane ale dispozitivului evită intersecţia între diverse puncte tastate. • Prezenţa electrozilor pe suprafaţa superioară ce este în contact cu presiunea de măsurat, poate conduce la degradarea performanţelor de sensibilitate a senzorului. • Localizarea contactelor electrice pe o faţă, simplifică concepţia senzorului, menţinându-i insă performanţele. Astfel, alimentarea se face după un ansamblu de celule situate în linie urmărind o bandă a circuitului conductor în care sunt izolaţi electrozii. Fiecare sistem de benzi sunt situate în paralel. • Electrozii situaţi pe o linie, adică perpendicular pe coloană sunt legaţi între ei. Principiul de măsură consta în a alimenta fiecare linie secvenţial, făcând un retur de potenţial al coloanei de măsurat spre liniile neactivate.
b). Senzorul integrat tip “piele artificială” • Este un circuit integrat VLSI a cărui suprafaţă este acoperită de către un material tip plastic conductor. Preluarea informaţiilor de variaţie a rezistenţei se face prin evaluarea unui ansamblu de electrozi în directă legătura cu circuitul integrat. Acest mod de operare permite ameliorarea problemelor legate de limitarea numărului de intrări-ieşiri a circuitului. • Ansamblul traductor furnizează o matrice de puncte de măsură. Tratarea acestor semnale se face prin intermediul unor operaţii simple între fiecare electrod şi vecinul său, ca în cazul unui procesor de imagini. Se poate chiar realiza recunoaşterea formei prin comparaţie cu un model reprezentat printr-o mască preprogramată. c). Senzor tactil cu elastomer tip plasă conductoare • Structura tip plasă conductoare utilizează un ansamblu de corzi din cauciuc sau silicon conductor. Principiul constă în modificarea suprafeţei de contact între doi electrozi, unul din elastomer conductor iar celălalt metalic, supuşi unei presiuni. Variaţia rezistenţei obţinute este o funcţie de logaritmul presiunii măsurate.
Senzorul matricial este practic realizat prin suprapunerea mai multor corzi paralele din elastomer conductor perpendicular peste un set de corzi metalice. Fiecare punct de contact, reprezintă un punct de măsurare, a cărui analiză se efectuiază secvenţial. • Alimentarea se realizează urmând o întreagă coloană prin intermediul unei rezistenţe. Liniile sunt puse succesiv la masă pentru a realiza un circuit de măsură de tip potenţiometru. • Problema mai dificilă constă în determinarea presiunii la nivelul unui punct de măsurare, fără a fi influenţată de celelalte puncte din vecinătatea sa. Problema este cu atât mai delicată, deoarece prin însăşi principiul său, există un mare număr de rezistenţe în paralel pe fiecare punct de măsurare. Această problemă s-a rezolvat, impunând fiecărei linii inactive, un potenţial egal cu valoarea corespunzătoare unui punct de măsură.
d). Senzor tactil cu magnetorezistenţe • Se compune din trei elemente principale: • reţea de magnetorezistenţe din permaloy cu o rezistivitate de aproximativ 17 ohmi/m şi o variaţie marimă a rezistenţei de 3%. Magnetorezistenţele sunt dispuse în matrice, astfel încât accesul la un element sa se facă prin adresarea unei linii şi a unei coloane; • sursă de câmp magnetic, reprezentată printr-un magnet permanent (Vicalloy sau Cromindur) sub forma unei foiţe subţiri de 25 micrometri; • folie dintr-un polimer suplu, plasată intre cele două elemente de mai sus. Principiul senzorului constă în a deforma foiţa din polimer cu scopul deplasării dipolilor magnetului permanent spre reţeaua de magnetorezistenţe Avantajul acestui senzor este faptul că poate măsura în acelaşi timp atât forţa de contact cât şi cuplul de rotaţie în jurul normalei la suprafaţă. Are o rezoluţie de 0,5 mm pentru o sensibilitate de 1-100 g /element.
e). Senzor tactil cu termistoare • Principiul senzorului termic, constă în măsurarea diferenţei de temperatură între un material de referinţă şi un obiect a cărui formă şi proprietăţi termice de material se doresc a fi determinate. Sistemul este realizat deasemenea din trei straturi: • un strat din material plastic (cauciuc sau silicon) a cărui formă şi proprietăţi termice se măsoară (1); • un strat din material de conductivitate termica cunoacută (2); • reţea de termistoare (3). • In absenţa materialului necunoscut (1), straturile (2) şi (3) sunt la aceiaşi temperatură cunoscută, reglată din exterior prin încălzire. Prezenţa unui obiect pe materialul (1), are ca efect variaţia temperaturii prin conducţie şi ca urmare modificarea rezistenţei termistoarelor din stratul (2). Deasemenea, viteza de variaţie a rezistenţei, este un indiciu al compozitiei materialului în contact.