Download
1 / 38
380 likes | 617 Views
POOL. Package logiciel permettant le développement rapide et aisé d'applications distribuées Fonctionne sur le principe des objets partagés Gère à la fois: Structuration des objets Distribution des données et des commandes Maintien de la cohérence Séquencement et mise à jour

E N D
POOL • Package logiciel permettant le développement rapide et aisé d'applications distribuées • Fonctionne sur le principe des objets partagés • Gère à la fois: • Structuration des objets • Distribution des données et des commandes • Maintien de la cohérence • Séquencement et mise à jour • Indépendance application / objet, • IHM graphiques (3D, vidéo, overlays…) • …
POOL : Besoins / Réponses • Interfaces et objets distribués
POOL : Besoins / Réponses • Interfaces d’échange • Gestion de ressources • Structuration • Séquencement • Objets standards • Objets graphiques • IHMs • Classes de base pour objets « Métier ».
POOL : Besoins / Réponses Indépendance et modularité Exemple 1 : Contrôle d’une tourelle réelle ou simulée
POOL : Besoins / Réponses Indépendance et modularité Exemple 2 : Contrôle d’un véhicule réel ou simulé
POOL : Architecture • Packages et dépendances avec modules externes
POOL : Package Pool/Platform Framework d’application Applications « Winforms » ou graphique Initialisation, chargement scripts, séquencement, logs, … Gestionnaire d’objets Création, chargement (scripts), importation, Composants, contrôleurs, objets de rendu, … Gestionnaire de distribution (PDM) Publications, souscriptions, export de données, commandes, … Gestionnaire d’un référentiel de ressources
POOL : Package Pool/Platform Utilisation de scripts (C# like) MotorTorques = {<600, 5000>, <2500, 27000>}; // tr/mn, N.m Options = Helicopter, JetEngine, EasyDrivingMode; Graphics.Model AlouetteModel // Modèle graphique associé { ModelResource = "AlouetteIII.3ds"; CullingMode = CullClockwiseFace; } Devices.Propeller MainRotor // Rotor principal { BoneRollAxis = UnitZ; } Devices.Propeller TailRotor // Rotor de queue { BoneRollAxis = UnitX; } Devices.Camera LeftSeat : Devices/Cameras/Generic // caméra siège gauche { WorldPosition = ../LeftSeat7.WorldPosition; NearPlane = 0.1; } Physics.HelicoBody HelicoBody // corps physique associé { Mass = 1000; / ….. }
POOL : Package Pool/Graphics Gestionnaire d’affichage Fenêtres, vues 3D, 2D ou vidéo Overlays de dialogue incrusté Moteur 3D de rendu optimisé Utilisation de l’accélération matérielle et de « shaders » fournis Rendu effectué uniquement si modification Tri des objets par « passes » Prise en charge auto de l’ordonnancement des objets transparents.
POOL : Package Pool/Graphics Objets de rendu inclus Modèles 3D structurés ( à partir de fichiers 3DS ou X). Formes 3D élémentaires. Surfaces de terrain (MNT) Billboards et particules Environnements (ciels, effets de brumes, etc.) Effets d ’éclairage (Phong, Bump, …), Effets spéciaux (eau, vagues, inondation, …)
POOL : Package Pool/Devices Objets et interfaces pour la robotique, vétronique ou simulation : Mobiles, Véhicules terrestres, bateaux, aéronefs, Caméras, tourelles 2 axes Capteurs lasers, Classes de base pour le développement d’objets spécifiques. Contrôleurs spécifiques : Pilotes autonomes (ralliement de cible, suivi de trajectoires), Contrôleur de localisation (fusion de capteurs, filtrage de Kalman), Asservissement de composants en translation (caméra de poursuite) et/ou en orientation.
POOL : Package Pool/Simu Contrôleurs de simulation : Simulation de caméras. Simulation de tourelle. Simulation de capteur laser. Simulation de moteurs. Simulation de systèmes de particules (émetteurs, durée de vie, aléas, …)
POOL : Package Pool/Physics Contrôleurs de base Corps statique de formes quelconques. Corps cinématique : animé en vitesse ou position. Corps dynamique : masses, moments d’inertie, animés par l’application de forces/couples Joints d’articulation entre composants Calcul des collisions avec prise en compte des matériaux physiques (friction, restitution, …). Contrôleurs dédiés Simulation de véhicules terrestres avec suspension Simulation d’aéronefs (hélicoptères, drones). Bateaux et submersibles.
POOL : Package Pool/Media Capture flux Vidéo/audio Vidéo analogique (dépendant de la carte d’acquisition) Audio analogique. Entrées numériques (video+audio) (FireWire, USB). Pilotage des dispositifs connectés) Choix des entrées, choix des codecs Réglages de contraste, luminosité, balance, … Pilotage de la caméra ou du caméscope, Utilisation des boites de dialogue fournis avec les dispositifs. Diffusion de fichiers Formats dépendant des codecs présents. Diffusion de flux RTP/RTCP Possibilité d’utiliser la vidéo comme une texture pour tous les objets 2D et 3D
TAROT • Projet financé par la DGA • Maîtrise d’œuvre: THALES Optronique (TOSA) • Objectifs: • Améliorer l’autonomie décisionnelle des robots mobiles terrestres : suivi perceptuels, gestion des obstacles, localisation / cartographie. • Rôles de Robosoft: • Algorithme de Suivi de Références Verticales par Laser : SRVL. • Intégration logicielle dans l’architecture TOSA.
TAROT • Algorithme de Suivi de Références Verticales par Laser • Exploitation de mesures lidar Sick (1 plan laser) et/ou Velodyne (64 plans laser). • Algorithme de reconstruction de l’environnement • Algorithme de détection de références verticales • Génération de consignes de guidage pour le suivi des références verticales : vecteur position + direction
TAROT • Principe algo Largeur max gabarit Vecteur cible Distance max Longueur max gabarit Plateforme
TAROT • Intégration dans l’architecture TOSA • RTMAPS. • Génération de consignes vitesse linéaire + vitesse de lacet. • Indicateurs de confiance. • Détection automatique et caractérisation continue des références verticales. • Capacités d’auto-réglage : auto-configuration et auto-adaptation. • Démarrage automatique.
TAROT • Utilisation de POOL: • Mise au point en simulation • Environnement 3D réaliste : relief et textures (ETAS) • Ajout de références verticales • Gestion de la simulation du véhicule cible et des capteurs • RTrooper • PFE ? • Velodyne • Sick • … • Communication entre l’algorithme et le simulateur
2RT-3D • Projet financé par l’ANR • Partenaires: LAAS, TOSA • Objectifs: • Développement d’algorithmes innovants de reconstruction du terrain et d’analyse de scène. • Evaluation des apports des nouveaux imageurs laser 3D de type Velodyne pour ces algorithmes. • Rôle de Robosoft: • Maîtrise d’œuvre. • Architecture logicielle accueillant les algorithmes. • Algorithme simple de reconstruction de terrain et de génération de trajectoire. • Publications et site internet.
2RT-3D • Architecture logicielle • Définition d’un protocole réseau de mise à disposition des mesures du lidar et de la localisation du véhicule. • Définition d’une base de données d’enregistrements lidar/véhicule peuplée par TOSA. • Définition d’un protocole réseau de mise à disposition des consignes de pilotage. • Définition d’un outil d’enregistrement et de rejeu de la base de donnée. • Algorithmes interchangeables dont un simple réalisé par Robosoft.
2RT-3D • Utilisation de POOL • Mise au point en simulation • Environnement 3D réaliste : relief et textures (ETAS) • Ajout d’obstacles • Affichage de la reconstruction • Gestion de la simulation du véhicule cible et des capteurs • RTrooper • PFE ? • Vélodyne • Sick • … • Communication avec les applications TOSA
SCA2RS • Projet financé par la FRAE • Partenaires: LAAS, Onera, SAFRAN. • Objectifs: • Démonter la mise en œuvre sure et vérifiable d’une autonomie de type intelligence d’essaim • Rôles de Robosoft: • Simulateur de la mission de sauvetage, incluant drones et survivants. • Une IHM « Maître du monde » • Une IHM « Poste de commandement »
SCA2RS • Rôle du simulateur: • Support et validation de la planification • Reflet réaliste du scénario de sauvetage • Hébergement et gestion des objets simulés et de l’IHM maître du monde • Interactions avec l’IHM « Poste de commandement » et la planificateur
SCA2RS • Rôle de l’interface « Maître du monde »: • Définir et contrôler l’environnement et les acteurs de la simulation. • Rôle de l’interface « Poste de commandement »: • Définir les zones à explorer • Analyser les photos prises par les drones • Décider de la fin de la mission
SCA2RS • Utilisation de POOL: • Environnement 3D réaliste : relief et textures (Grenoble) • Ajout de perturbations : inondation, brouillard… • Gestion de la simulation des drones, robots et survivants: • Pilotage des drones • Prise de photos • … • Communication entre les deux IHMs et avec le planificateur
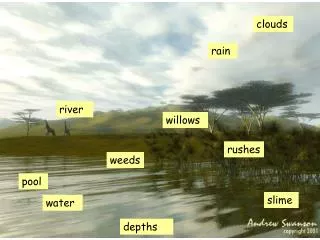
CONNECT • Projet financé par l’ANR • Partenaires: GIPSA-Lab, Ifremer, Prolexia • Objectifs: • Illustrer le contrôle de systèmes multi-agents, en intégrant des contraintes de communication. • Le scénario se déroule en milieu aquatique, la flotte de véhicules devant détecter une source d’eau douce. • Rôle de Robosoft: • IHM de supervision de la flotte de véhicules.
CONNECT • Rôle de l’IHM de supervision: • Supervision de l’état d’une flotte de véhicules • Environnement 3D réaliste • Communication avec le simulateur Prolexia
CONNECT • Utilisation de POOL: • Environnement 3D réaliste • MNT des terres • MNT du fond marin (fourni par l’Ifremer) • Visualisation 2D et 3D de la diffusion d’eau douce • Visualisation des indicateurs de communication (emprise modems, envoi/réception de message…) • Modèle 3D des véhicules • Utilisation de sprites pour les algues et poissons. • Communication avec le simulateur Prolexia
NAVIFLOW • Projet financé par la FRAE • Partenaires: CEA-List,Heudiasyc,ONERA • Objectifs: • Développer des fonctions de navigation efficaces et robustes en environnement urbain pour des drones à voilure tournante. • Rôles de Robosoft: • Station sol pour drone X4 et Ressac
NAVIFLOW • Rôle de la station sol: • Supervision de l’état du véhicule • Pilotage du véhicule ou des capteurs (éventuel) • Visualisation des retours vidéos • Communication avec les applications des laboratoires
NAVIFLOW • Utilisation de POOL: • Environnement 2D réaliste avec incrustations • Visualisation des retours vidéos: • incrustations (informations, flux optique …) • différents modes de visionnage (une vidéo plein écran / une vidéo grande taille + plusieurs vidéos miniatures / plusieurs vidéos bandeau…) • Généricité de l’application quelque soit le véhicule (X4, Ressac ou PFE): association contrôle graphique et l’object POOL correspondant.