Download
1 / 37
370 likes | 491 Views
MCC-I1 Design Specifications. Roberto Beccherle / INFN - Genova E-mail: Roberto.Beccherle@ge.infn.it MCC-DSM Team : R.Beccherle, G.Comes, G.Darbo, P.Denes, P.Fisher, G.Gagliardi, K.Kostas, P.Morettini, P.Musico, I.Peric, C.Schiavi Copy of This Talk: http://www.ge.infn.it/ATLAS.

E N D
MCC-I1 Design Specifications Roberto Beccherle / INFN - Genova E-mail: Roberto.Beccherle@ge.infn.it MCC-DSM Team: R.Beccherle, G.Comes, G.Darbo, P.Denes, P.Fisher, G.Gagliardi, K.Kostas, P.Morettini, P.Musico, I.Peric, C.Schiavi Copy of This Talk: http://www.ge.infn.it/ATLAS
System Architecture • 1 Sensor • 16 Front End chips (FE) • 1 Module Controller Chip (MCC) • 2 VCSEL Driver Chips (VDC) • 1 PIN diode receiver (DORIC) module control room Optical Receivers Readout Drivers (ROD) Readout Buffers (ROB) Timing Control (TIM) Slow Control, Supplies
System Architecture module control room • Data push architecture: All FE chips are connected to the MCC with a star topology (point to point data links). 1 link between each FE and the MCC. • All module operation is controlled via the MCC with a serial protocol. • All data links active during data taking mode areLVDS.
MCC: Architecture • Serial data coming from FE chips are stored in 16 full-custom 27x128 bit deep FIFO’s until event building occurs. • Trigger, Timing & Control circuitry • Command Decoder:5-bit Trigger command is recognized correctly, without any loss of synchronization even with a single bit-flip in the command.It is not possible to mix up configuration and data taking commands in case of bit-flips in the commands. • Event Builder. • Register Bank:Holds configuration information and stores eventual error flags. • Output Port:Formats data on two output pins allowing data speeds from 40 to 160 Mbit/s.
MCC–I1: Main Characteristics • System startup and initialization. • Decode data/command signals (from the ROD):A simple serial protocol is used for all communication between the ROD and the MCC and also between the MCC and the FE chips (Slow, Fast and Trigger commands). • Trigger, Timing and Control: the MCC has to provide Triggers to all FE chips and keep event synchronization. • The MCC receives serial data from 16 FE chips, accumulates data in local FIFO's. • Event building: complete module events are reconstructed with some data compression. • Scoreboard mechanism allows to start event building as soon as all enabled FE chips finish sending the data of one complete event. • Send event to DAQ (via VDC) • Error handling: (FIFO overflows, misalignment of data from FE chips with BCID information, disable defective or noisy FE chips, ...) IBM 0.25 mm rad-tolerant design Die size is 6.38 x 3.98 mm2 16 FIFO’s (128 21bit words) 1 analog delay line 650.000 transistors
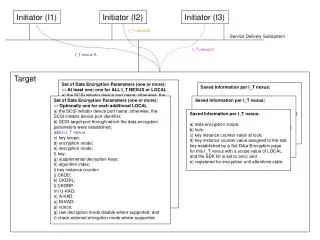
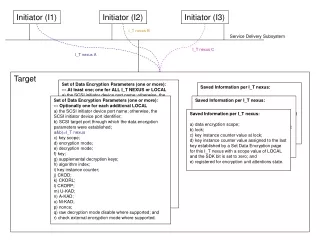
System Initialization and Configuration • At power up the whole system has to be correctly initialized. • FE chips and the MCC are connected by means of a star topology in which each FE has dedicated parallel connections with the MCC. • Each FE has one 40 MHz LVDS data and clock line and 3 slower (5 MHz) common configuration lines. • FE chips can be addressed by the MCC either in “broadcast” mode or one by one using their geographical address. • In order to reduce the number of electrical connections to the module our system does not provide a pin reset signal. • The MCC Command Decoder is designed so that at power up, after a finite amount of time, it returns to the idle state in order to be able to accept a Global Reset command that puts the chip in it’s default state. • At this point global configuration data (number of enabled FE chips, desired output mode, …) can be stored in the MCC register bank. • The next phase implies a Global reset to all FE chips of the module. • Once the whole system is initialized configuration of the single FE chips can begin.
MCC–I1: System Functions System Configuration: • Individual FE addressing to R/W configuration data before a run starts. • MCC configuration and ability to test FE chips during module assembly. Event Building: • As soon as a FE receives a hit the information is sent to the MCC. • Data storage in 16 full custom FIFO’s until all FE’s terminate transmitting hits belonging to the same event. • Data are formatted with some event compression and are sent to the ROD. • Ability to provide error detection during Event Building. Trigger Timing and Control: • Trigger distribution to all FE chips keeping the synchronization. • Error detection in case of buffer overflows and truncated / lost events. Testability: • Ability to disable one or more FE chips without stopping the whole module. • Capability of testing internal structures in case of errors. • Transmission error detection.
MCC-I1: Configuration • The MCC Command Decoder allows 3 type of serial commands; • Slow Commands, used during module (FE and MCC) configuration; • Fast Commands (data syncronization) that can be issued without exiting data taking mode; • Trigger commands. • There are 8 16-bit wide configuration registers inside the MCC that allow to configure the chip for all its features, like: • Enabling a certain number of FE chips on the module; • Output data mode: 40 Mbit/s, 80 Mbit/s and 160 Mbit/s on one or two output lines are supported; • Selecting the level of error checking/reporting; • There is the ability to self test most of the chip circuitry. One can,for example, send data that simulate data coming from certain FE chips and perform real event building on these data. • Calibration of all FE pixels is possible using an analog delay line that provides a signal sent to a chopper circuit inside the FE chip that allows charge to be injected in each single pixel cell (2 different charge ranges may be selected). • FE configuration data is sent on a dedicated line and validated by a load signal.
MCC-I1: Data-Taking • Data Taking phase can occur immediately after system initialization. • The system has to be set in Run Mode and after that only Trigger and Fast commands are allowed, any Slow command will return to Configuration Mode. • The architecture of the module is Data Push, i.e. as soon as the MCC receives a Trigger command it is immediately sent to the FE chips for data collecting. • Up to 16 pending Triggers are allowed in the system. • Trigger commands are 5-bit commands that allow automatic correction for eventual bit flips inside the command preserving correct timing information. • A Pending Event FIFO keeps track of how many Events have still to be processed. • In case more than 16 Triggers are received before an event is fully reconstructed they are simply dropped and the information will be propagated to the ROD inserting a Warning word in the corresponding Event. • This mechanism allows the ROD to insert empty events to maintain synchronization with the data flow. • Event Counter Reset and BCID Reset commands (Fast commands) can be issued to keep correct event synchronization.
MCC-I1: Data-Taking • Only enabled FE chips participate to Event building. • 16 parallel data streams are received and stored in 16 independent FIFO’s. • Each Event is identified by an EoE word. • EoE information is stored in the Scoreboard. • As soon as all 16 EoE words of an Event are collected event building is performed. • 8 bit BCID and 4 bit Lev1 information is stored with each incoming Trigger. • Event building collects data from all 16 FIFO’s and formats the output data stream according to the selected output mode. • Up to two output lines (each sampling data on both clock edges) can be used in order to provide a data throughput up to 160 Mbit/s. • Data consistency checking between hits from the same FE chip and between EoE words from different FE’s is performed. • FIFO data overflow, which produces loss of hits, may occur and is signaled in the data flow.
MCC-I1: Command Decoder • Designed for single bit flip tolerance in command stream. • No mismatch between Trigger, Fast and Slow commands in case of bit flip. • A wrong Fast command is never interpreted as a different Fast or a Slow command in case of a single bit flip. • A wrong Slow command can never be interpreted as a Fast or a Trigger command. • 5-bit Trigger command (11101) with one bit flip allowed. • 4 Fast Commands: (BCR, ECR, CAL, SyncFE). • BCR [10110.0001]: Bunch Counter Reset. • ECR [10110.0010]: Event Counter Reset. • CAL [10110.0100]: Calibration signal for the FE chips. • SyncFE [10110.1000]: One CK pulse lasting reset signal to the FE chips. • 10 Slow Commands (WrRegister,RdRegister, WrFifo, RdFifo, WrFrontEnd, RdFrontEnd, WrReceiver, EnDataTake, GlobalResetMCC, GlobalResetFE ). • The Header of the Slow commands is 10110.1011 • 4 different state machines which do not need, by construction, a reset to start in idle mode.
Trigger and Fast commands • Trigger and Fast commands are executed only if the MCC is in RunMode (must execute an EnDataTake command). • LV1: Triggers the acquisition of a new event A LV1 is issued to the FE chips, L1ID and BCID values are stored in the PendingLv1Fifo, the L1ID counter is incremented. • BCR: Bunch Counter Reset The BCR counter inside the MCC is set to 0. • ECR: Event Counter Reset (data-path reset) Reset of the ReceiverFifo‘s and the PendingLv1Fifo pointers are cleared, the L1ID counter is cleared. If there are events pending they are cleared. • ROD must take care that no data is coming from the FE’s after a CAL command has been issued! • CAL: Calibration pulse generation Length and Delay (~0.5 ns steps) are set in the CAL register.
Slow commands The Header (10110.1011) is followed by 2 (or 3) more fields NameField3Field4Field4Data bits WrRegister 0000 Address Data 16 bits RdRegister 0001 Address ---- 16 bits WrFifo 0010 ---- Data 21 bits RdFifo 0011 Address ---- 21 bits WrFrontEnd 0100 ---- Data CNT<15:3> *8+CNT<2:0> *64 RdFrontEnd 0101 ---- Data CNT<15:3> *8+CNT<2:0> *64 WrReceiver 0110 ---- Data CNT<12:0> *8 EnDataTake 1000 ---- 0 GlobalResetMCC 1001 ---- 0 GlobalResetFE 1010 ---- SyncW 4 bits
Slow command description 1 of 2 • WrRegister: Writes data to the addressed register • Does not produce any output data! • RdRegister: Reads addressed register • Produces hex:0000 if wrong address is selected! • WrFifo: Writes data into selected (FEEN register) FIFO’s • Write Pointer is incremented • RdFifo: Reads data from addressed FIFO’s • Read Pointer is incremented • WrFrontEnd:Write configuration data to all FE chips • CNT<15:3> + CNT<2:0> * 8 bits are written • CCK, which is 8 times slower, and not CK is used to transmit data • RdFrontEnd: Read conf. data from enabled FIFO • The FIFO is enabled setting the FEEN register • Only one FIFO has to be selected!
Slow command description 2 of 2 • WrReceiver: Writes data into the selected Receiver. • Receivers are selected by the FEEN register. • This command is designed to exercise the EventBuilder and the Receiver blocks with simulated events. FE inputs must be disabled. • EnDataTake: Enable RUN mode in the MCC. • Fast and Trigger commands are executed only in RunMode. • A Solw command sets the MCC in Configuration mode! • GlobalResetMCC: • Internal registers and status flags are reset, FIFO pointers are cleared and state machines are put to their idle state. • Only the Command Decoder is unaffected! • GlobalResetFE: Sends a reset signal to all FE chips. • The width of the signal is read from the SyncW field. • Different reset widths act differently on the FE chips. • The width can range from 1 to 31 CK units.
Required timing & Command robustness • Trigger commands can be issued without any gap (125 ns). • After a Trigger command both Fast and Slow commands can be issued without any gap. • After a Fast command a Trigger can be issued without any gap. • After a Fast command 2 CK cycles should be left before issuing a new Fast or Slow command. • The command decoder was optimized for being able to detect a Trigger command even in presence of a single bit flip. • Correct timing information is restored in this case. • A Fast command is never recognized as a different Fast or as a Slow command in case of a single bit flip. • A Slow command header is never interpreted as a Fast command in case of a single bit flip.
Command robustness: Trigger command Received Pattern Recognized Pattern Recognized command 0000 11101 00 0000 11101 00LV1 0000 1110110 0000 11101 10 LV1 0000 11100 00 0000 11100 00 LV1 (with bit flip) 0000 11111 00 0000 11111 00 LV1 (with bit flip) 0000 11001 00 0000 11001 00 LV1 (with bit flip) 0000 10101 00 0000 10101 00 LV1 (with bit flip) 0000 01101 00 0000 01101 00 LV1 (with bit flip) 000111101 00 0001 11101 00 LV1 0010 11101 00 0010 11101 00 LV1 0100 11101 00 0100 11101 00 LV1 Recognized patterns are:11101, 11100, 11111, 11001, 10101, 01101 Inthis case correct timing information is restored!
State Machines: Lv1Fast cmd_shift_reg<4:0> != 11101 |01101 | 10101 | 11001 | 11111 | 11101 | 10011 S0 cmd_shift_reg<4:0> = 10011 cmd_shift_reg<3:0> != 1011 & zero = 1 S1 cmd_shift_reg<4:0> = x1011 & zero = 1 zero = 0 S2 cmd_shift_reg<3:0> = 7,8,A,B,C,D,E,F & zero = 1 zero = 0 cmd_shift_reg<3:0> = 0,1,2,3,4,5,6,9 & zero = 1 S3 slow_enc<2:0> = 000 & stop_slow = 0 | stop_slow = 1 slow_enc<2:0> != 000 & stop_slow = 0
State Machines: Slow Start=0 slowenc<2:0> = 0 & zero = 1 Start=1 S0 zero = 0 slowenc<2:0> = 5,6 & CCNT<6:0> != 0 & zero = 1 S1 slowenc<2:0> = 1,2,3,4 & zero = 1 slowenc<2:0> = 5,6 & CCNT<6:0> = 0 & zero = 1 slowenc<2:0> = 7 & zero = 1 S2 S3 S4 S5 zero = 0 zero = 1 zero = 1 zero = 0 S6 slowenc<2:0> != 6 zero = 1 zero = 0 slowenc<2:0> = 6 zero = 0 zero = 1 S7
State Machines: Cal start=0 S0 start=1 zero=1 S1 zero=0
State Machines: CCK Start=0 S0 S4 Start=1 S1 S5 S2 S6 S3 S7
Register Bank Register Address Content Description CSR0000---S,SSSS,-CCC,CCCC Control Status Register LV1 0001----,CCCC,LLLL,LLLL Trigger Register FEEN0010dddd,dddd,dddd,dddd Front End Enable WFE0011dddd,dddd,dddd,dddd Warning from FE chips WMCC0100dddd,dddd,dddd,dddd Warning from MCC Receiver CNT0101cccd,dddd,dddd,dccc Control & Data counters CAL0110----,-pRR,RRDD,DDDD Calibration Register PEF0111SSSS,LLLL,BBBB,BBBB Pending Event FIFO Note: B,c,d,D,l,n,p,R,s,S,w: used data bit -: Non existing bit. It is always read back a ‘0’ • A WrRegister command does not produce any output data.
Control & Status Register • CSR<6:0> Control part. • <0,1> OM: Output mode selection. From 40 Mb/s single link to 160 Mb/s. double link. In case of single link same data transmitted on both links. • <2>EREP: Enables error report in the event data for the LV1 check(s). • <3>ECHK: Enables the LV1 check amongst FE chips done in the EventBuilder. • <4> TOT: Enables Time over Threshold option in the MCC. • <5> OPAT: Generates a 010101... pattern on the MCC-DTO-0/1 outputs. • <6> PLBK: Test mode used to be able to playback events after having written simulated FE data in the Receivers. This disables data coming from the FE chips. LV1 command is needed to read out data. • CSR<12:8> Status part. • <8> WLV1: There has been a bit flip in a Trigger command. • <9> WFST: There has been a bit flip in a Fast command. • <10> WSLW: There has been a bit flip in a Slow command. • <11> ERR0: Error on a LV1 check inside a single FE data stream. • <12> ERR1: Error on a LV1 check amongst data of different FE chips.
Register description 1 of 2 • LV1: Level 1 Trigger • LV1<7:0>, Level1 ID counter: Mapped to the Lv1Counter. • Not affected by a WrRegister command! • LV1<11:8>, Contiguous Level1: 1 to 16 LV1’s. Triggers have the same L1ID, consecutive BCID numbers. • FEEN: Front End Enable. • WFE: Warning from a FE chip. • If a warning is written by a FE in the EoE word the corresponding bit is set. • WMCC:Warning from MCC Receivers. • Set if there is an overflow in the corresponding ReceiverFIFO. • CNT: FE Configuration Counters. • CNT<15:3>, Data bits: [LD is high during data phase]. Number of data bits in the command going to the FE chips in CCK units. • CNT<2:0>, Command bits: [LD is low during command phase] Number of bits in a FE command in CCK * 8 units (multiples of 8 required). • CNT<15:0>, Width of the STRO pulse in CK units generated in response to a CAL command.
Register description 2 of 2 • CAL: Calibration register, calibration pulses for the FE chips • CAL<5:0>: Calibration delay. Delay of the strobe pulse in ~0.5 ns steps (at max. resolution). Determines the width of the strobe pulse (From 1 to 512 CK units). • CAL<9:6>: Calibration range. Allow to select the coarse tuning of the minimum delay step of the strobe pulse, generated in response to a CAL command. • CAL<10>: Turns on (‘1’) or off (‘0’) the whole Delay Line. • PEF: Pending Event FIFO (GlobalResetMCC clears pointers, not contents) • PEF<7:0>: BCID Mapped to the PendingEventFifo<7:0> which contain the BCID information. • PEF<11:8>: L1ID Mapped to the PendingEventFifo<11:8> which contain the L1ID information. Only the 4 LSB of the LV1Counter are copied into the FIFO and are always added to the 4 LSB of the L1ID field of the MCC output data stream. • PEF<15:12>:Skipped events Mapped to the PendingEventFifo<15:12> interpreted by the EventBuilder as the number of skipped events. If different from ‘0’ it is interpreted by the ROD to know the number of missing events in the data stream due to a PendingLv1Fifo overflow. A number of 15 means that the counter has overflown. This field is always added to the 4 MSB of the L1ID field of the MCC output data stream.
MCC-I1: Trigger Timing & Control • BCID Counter (8 bit): Incremented each clock cycle. • LV1ID Counter (8 bit): Incremented each time a LV1 has been received (even if it has been dropped). Contiguous LV1’s are counted once. • PendingLV1Counter (5 bit): Has Full (16), Almost Full (15) and Empty flags.The counter is incremented if a LV1 has been issued and the counter is not full. It is decremented each time a LV1 has been read and the counter is not empty. • SkippedLV1 counter (4 bit): Incremented each time a LV1 is received and rejected. • Contiguous LV1 counter (4 bit): Each time a LV1 is received the counter is loaded with the contiguous LV1 value and is then decremented at each clock cycle. • A state machine accepts or rejects the incoming LV1’s depending on the counters. • BCID, LV1ID and SkippedLV1 values are to be written into the PendingLV1FIFO. BCID and LV1ID values are updated each time there is an accepted LV1.SkippedLV1 is updated if the PendingLV1FIFO is full and a ReadPendingLV1FIFO command has been issued (by the Event Builder). • A WritePendingLV1FIFO command is generated each time a LV1 is accepted and the PendingLV1 counter is not Almost Full. If this counter is Almost Full and a new LV1 is received we wait until the next ReadPendingLV1FIFO command before generating the command. This ensures that the correct value of SkippedLV1 is written to the PendingLV1FIFO.
MCC-I1: Receiver • 25 bit shift register: Collects data stream coming from a FE chip (only if in Run Mode). As soon as a complete Hit/EoE word has been read data, if possible, is copied to the SRAM. We can distinguish between Hits, EoE words with and without warnings. • SRAM (27 x 128 bit): Dual Port Static RAM (done by K. Kostas, CERN) used as FIFO. • Read Address: Incremented each time a word is written to the FIFO. • Write Address: Incremented each time a word is read from the FIFO. • Hit Counter (8 bit): Has Full (112) and Empty flags. Incremented each time a Hit has been detected and the counter is not Full. Decremented if a Hit has been read and the counter is not empty. If more than 112 Hits are seen they are simply dropped! • EoE Counter (5 bit): Has Full (16) and Empty flags. Incremented each time an EoE has been detected and the counter is not Full. Decremented if an EoE has been read and the counter is not empty. It will always be possible to write all 16 EoE words! • LV1Id check: The LV1ID of the first Hit is copied and checked against following ones. • EoE words written to the FIFO (21 bit) have the following data format: {111X,FE_Flag[3:0],00,LV1IDCheckFail,EoE Overflow,EoE Overflow,0000,LV1ID[3:0]} where:X = LV1IDCheckFail | EoE Overflow | HitOverflow
Output data format 1 of 2 <Event> ::= <Header> L1ID <S> BCID <MccFlag>? <FrontEnd>* <Trailer> <Header> ::= 11101 <S> ::= 1 <MccFlag> ::= <Sync> MCC-FLAG <Sync> ::= <S> ||= < <S> NULL >+ <FrontEnd> ::= <Sync> MCC-FE# <Hit>+ <FeFlag>? ||= <Sync> MCC-FE# <Hit>* <FeFlag>? <Hit> ::= <Sync> ROW# COL# (TOT, if ToT is selected) <FeFlag> ::= <Sync> FE-FLAG <Trailer> ::= <S> 00 0000 0000 0000 ( 0000 0000, if ToT is selected) <Name> Syntax construct defined by other syntax construct or bit field. NAME Bit field. Definitions are presented in the table on next page. <Name>? Is an optional field, 0 or 1 items occurrence. <Name>* Is 0, 1 or more items. <Name>+Is 1 or more items ::= Gives a syntax definition ||= Gives an alternate definition
Output data format 2 of 2 Keyword min value max value Description BCID0000 0000 1111 1111 Bunch crossing ID (0÷255) COL# 0 0000 1 1111 Column number FE-FLAG 1 1110 FFFF MMMM Err/Wng F = FE, M = MCC L1ID 0000 1111 Level 1 Trigger ID (0÷15) MCC-FE#1110 0000 1101 1111 FE number in module (0÷255) MCC-FLAG0000 0000 1101 1111 Err/Wng message from MCC NULL 1111 1111 Null data ROW#0000 0000 1101 1111 Row number (0÷224) TOT0000 0000 1111 1111 Time over Threshold
MCC-I1: Event Builder • Priority Encoder: Generates the Enable signal for the next FE to be read out. • Din Mux: Selects which FE data are to be read out based on the Enable signal. The FE is selected if there is a Hit or an EoE word with warning. • Scoreboard: Keeps track of received EoE words. Generates the Build signal. • FE Flag Generator: If there is a warning inside an EoE word. If ECHK is enabled and there is a LV1ID mismatch between different EoE words. The FE Flag word is the logical or of all possible Warnings. 4 bits come from the FE’s, 3 from the Receiver and one from EVB. • EVB Control: Data is generated only if (DATA_TAKE | PLBK) is true. State machine that performs event building and prepares the output data. • Data preparation: The Event Builder output is a 26 bit register. EVB Control writes the correct word, together with it’s length, to this register following the data grammar. Possible output words are: {Header, LV1ID, Sync, BCID} 22 bit {Sync, 0111, FE#} 9 bit {Sync, Hit Data, ToT} 22 (14) bit {Sync, Trailer} 23 (15) bit {Header, Rd_FE_FIFO} 26 bit
MCC-I1: Output Port • Shift Register (32 bit): Loaded with data coming from the Event Builder as soon as a Header is ready to be transmitted. Shifts 1, 2 or 4 locations according to selected output mode. • Counter (5 bit): Loaded with data length of data loaded in the Shift Register. Decremented by 1, 2 or 4 at each clock cycle. Each time the counter gets below a certain threshold new data is loaded in the Shift Register and the counter is updated accordingly. If no data is available the Shift Register is updated each clock cycle. • DOUT (4 bit): Filled with data coming from the 4 less significant bits of the Shift Register. The register is updated each clock cycle. The multiplexer selects data according to the selected output mode: (40X1) DOUT[3:0] = {ShReg[0], ShReg[0], ShReg[0], ShReg[0]}; (80X1) DOUT[3:0] = {ShReg[1], ShReg[1], ShReg[0], ShReg[0]}, (40X2) DOUT[3:0] = {ShReg[1], ShReg[0], ShReg[1], ShReg[0]}; (80X2) DOUT[3:0] = {ShReg[3], ShReg[2], ShReg[1], ShReg[0]};
MCC-I1: FE Port, Module Port • FE Port: Synchronizes data between MCC and FE’s with the system clock. • SYNC = Sync command | GLB_FE_RST; • LV1 = LV1_TTC & ~PLBK;This ensures that no Trigger commands are sent to the FE’s while in Playback mode. This feature is used during MCC self testing. • DTI signals are synchronized with the system clock. • Module Port: Synchronizes data between MCC and ROD with system clock. • DCI is synchronized wit the system clock. • DTO: Data is selected between different possible signal sources: • RdRegister,EVB, Opat, RdFrontEnd. • RdFrontEnd output pattern is the logical or of all enabled FIFO’s. • In 80x1 and 80x2 output modes data is transmitted on both edges of the clock. • Output Pattern (0101010101…) is generated if this mode is selected taking into account the selected output mode. • All output data uses the 11101 header.
MCC_top schematic Latch DFF Latch mux DCI DTO<1:0> mux AMS/DSM mux DFF DTI<15:0> Latch MCC_CORE Return Clock SystemClock RSIb InputClock
MCC -> FE: Configuration data format • Configuration data between the MCC and the FE chips uses the values stored in CNT<15:3> and CNT<2:0> in order to determine when to rise the LD signal needed by the FE chips to distinguish between Data an Command bits in the data stream. • LD is low for the first CNT<2:0> * 8 CCK pulses, is risen on the CCK trailing edge staying high for CNT<15:3> CCK pulses. • If the number of control bits is not a multiple of 8, one has to add zeroes to the MSB part of the control bits to create an n bit word and n/8 must be loaded in the CNT<2:0>.
MCC -> ROD: Link operation • Different output modes are selected by setting CSR<1:0> 00:40 x 1@ 40 Mb/s 01:40 x 2@ 80 Mb/s 10:80 x 1@ 80 Mb/s 11:80 x 2@ 160 Mb/s • In 40 x 1 and 80 x 1 modes the same data is transmitted on both links • Configuration data is always sent @ 40 Mb/s
MCC-I1: Next Steps • Single event upset studies have been performed at CERN’s PS. • This is a very important issue for the final reliability of the entire project and many different approaches are possible in order to address the problem. • SEU free FF’s: We really need to understand the results of these flip flops that were developed by the Pixel FE community. Such FF’s would be the best approach for most parts of the chip. • Hamming Code Correction: This would probably solve the problem of data integrity inside the 16 MCC FIFO’s. Data size of actual FIFO’s is 27 bit (instead of the required 21) and 6 additional bits are exactly what is needed for doing Hamming Correction. One would calculate the Hamming Code of data to be written to the FIFO and correct eventual bit flips before processing data in the Event Builder. • Triple Logic with majority voting: This technique helps on bigger designs where speed is crucial and where Hamming correction is not feasible (i.e. State Machines). • There is no unique and/or secure solution to the problem. Probably a combination of these methods would help but we will never be able to address all possible situations. • System solutions: Add some intelligence in the ROD and allow for fast reaction.
Conclusions & Outlook • This talk highlighted the design aspects involved in the design, synthesis and functional verification of the MCC-I1. • Verilog was used for the design description. • Synopsys was used for the synthesys of the whole chip, with the exception of the topmost cells. • Particular attention was put in the testability of the design and an ad-hoc simulation framework was set-up and used throughout the whole design phases and system tests performed on real chips. • The described approach has proven to be effective and produced high quality results, but there are still improvements to be performed. • Some minor design errors went through the simulation process… • SEU studies in the design would give more insight on the criticality of the effect on global system performances: • It is a rather difficult and time consuming task. • A SEU-proof DFF would be a big improvement for such types of designs!