Download
1 / 52
520 likes | 667 Views
Lecture 12. Stability, the Phase Plane, and a Taste of State Space. We’ve been working with second order equations and informal stability. We know that an inverted pendulum is unstable. A regular pendulum swings back and forth, neither unstable, nor stable call it marginally stable.

E N D
Lecture 12. Stability, the Phase Plane, and a Taste of State Space We’ve been working with second order equations and informal stability We know that an inverted pendulum is unstable A regular pendulum swings back and forth, neither unstable, nor stable call it marginally stable Our canonical damped system decays to zero. It is stable These are examples of linear stability, determined by the real part of s Re(s) > 0 is unstable Re(s) = 0 is marginally stable Re(s) < 0 is stable
We can talk about stability is another context, so-called absolute stability which we can address in state space, of which we’ll see a lot later Tonight I’ll just give you all a taste, starting with a two dimensional state Each second order equation can be converted into a pair of first order equations We know that we can fix the state of a 1DOF system by specifying the variable and its derivative That’s what initial conditions are all about These are the elements of a state, and we can define an abstract vector space: state space the state vector
This works for larger systems as well We’ll use this almost exclusively in the second half of the course This is an excellent tool for looking at the behavior of nonlinear systems If we have a 1DOF system, the phase space has two dimensions and we can draw pictures of these — called the phase plane The phase plane is a picture of a two dimensional state space, and I want to start there
Let’s look at two nonlinear systems in state space by drawing their phase planes. The simple pendulum The van derPol equation The first thing we have to do is to convert these to pairs of first order equations Then we can plot the derivative as a function of the function
Start with the pendulum Clearly I can transform the second form back to the first We can plot w vs. q. What can we say in general? If w > 0, then q increases, and vice versa: a point in the upper half plane moves to the right a point in the lower half plane moves to the left. If sinq > 0, then w decreases, and vice versa: a point in the right half plane moves down a point in the left half plane moves up.
a point in the upper half plane moves right a point in the lower half plane moves left. p -p a point in the right half plane moves down a point in the left half plane moves up.
We can look at what happens when we plot results Let g/l = 1 for convenience
Now let’s look at the van derPol equation supposing µ > 0 As before Points above the axis move right and those below move left The other is more complicated If y is small, v will increase If y is large, v will decrease
Let’s think a little bit more The pendulum is marginally stable, and we had closed orbits meaning that The corresponding variable for the van derPol equation is How does this vary with time?
decay growth decay
How does this connect with what we have been doing? Canonical 1DOF system If a = 0, we can play the stability game
Since when v = 0 there is no equilibrium without y = 0, so we have absolute stability
We can write the state space problem for this linear system as We care about both the homogeneous and particular solutions but the phase plane is really suited to understanding the homogeneous one
What does this look like? We know what the response looks like, but what does the response look like in phase space? We’ll look at this for wn = 1 and z = 0.05, 0.5, 1, and 10 Start all of them at y = 1 and v = 1 and go for 100 seconds
Do a full (forced) problem in state space state vector = {y,v}T, wherevdenotes the derivative of y state equations in complex notation for sine forcing
The particular solution will have the same time dependence as the forcing the equation factor rearrange define
solve the second half of (1) where which inverts to and the answer is
expand You can convert these to real form, and I’ll leave that to you. Let me plot the response and its representation in the phase plane same initial condition withz = 0.2
There’s no need to restrict the development to a one degree of freedom case Denote the size of the square matrix A by N The vectorbis then of length N N is generally twice the number of degrees of freedom for purely mechanical systems This is because we double the number of equations when we go from second order systems to first order systems — more next week There are general cases where N need not be even — wait for that
We can eventually base everything on the homogeneous problem We know that this has exponential solutions which leads to
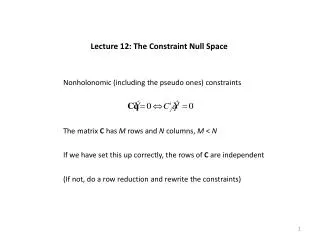
This is the matrix eigenvalue problem Find s such that This will be a polynomial in s of degree N, and the leading term will be sN. There will be N roots of the polynomial — they need not be distinct
There will be an eigenvector associated with each root The eigenvectors must be independent and they usually will be in the engineering world We can write a general homogeneous solution in terms of the eigenvaluesand eigenvectors
The particular solution is pretty straightforward for single input harmonic forcing The general case is accessible, but we don’t know enough yet so I’ll restrict this discussion to the harmonic forcing case (which is what we have here)
We need to combine the particular and homogeneous solutions to solve the initial conditions We can rewrite the homogeneous one in a nicer form Define