Download
1 / 28
310 likes | 757 Views
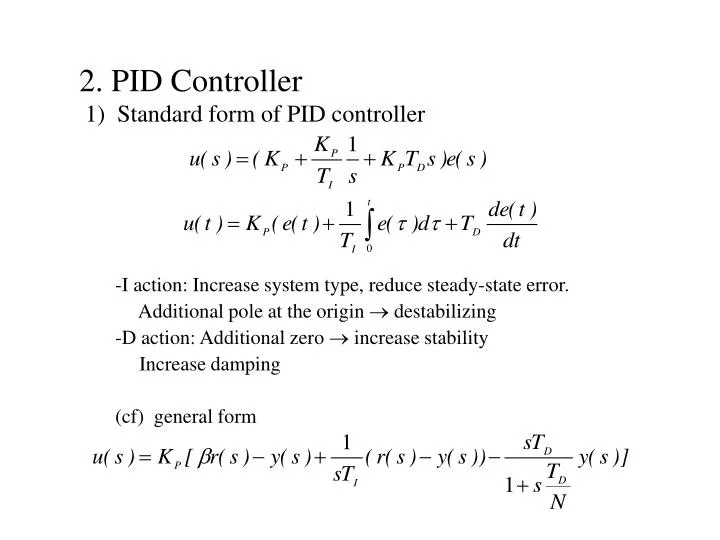
2. PID Controller 1) Standard form of PID controller I action: Increase system type, reduce steady-state error. Additional pole at the origin destabilizing D action: Additional zero increase stability Increase damping (cf) general form.

E N D
2. PID Controller • 1) Standard form of PID controller • I action: Increase system type, reduce steady-state error. • Additional pole at the origin destabilizing • D action: Additional zero increase stability • Increase damping • (cf) general form
2) Time-response sensitivity to parameters • Assume depends on the parameter , i.e. • How to relate to ? • Def: Logarithmic sensitivity function • The change in the output with respect to percentage change in the parameter.
3) Tuning method of PID controllers • Eiegler-Nichols tuning rule • Stability margin tuner • (cf) There are many methods based on optimization techniques also • there are many AI techniques, pattern recognition techniques. • (i)Z-N tuner • Process reaction curve method • Ultimate gain method • Basically, auto-tuner consists of two stages i.e. identification stage and tuning stage
Process reaction curve method • Assumption on model : • Parameter achieve from unit step response. • Tuning to achieve decay ratio of 25%.
Ultimate gain method • Identification of oscillation point gain tuning
(ii) Stability margin tuner • Identification of one point in plane. • Tuning based on margin. • 4) Integrator Antiwindup • Consider a PI control system.
How to tackle this problem? • Turn off the integral action as soon as the actuator saturates! • Antiwindup PI
• See Ex. 4.12
3. Steady-state Tracking and System Type • vs. system type: • : position-error constant = • : velocity constant = • : acceleration constant = • (cf) Disturbance rejection vs system type • same as vs. system type.
(cf) Truxal’s Formula : • when is of type 1. • with • Let (ramp), then
Using L’Hopital’s rule, • Assume T(s) = • Then
4. Stability • BIBO stability • Stable iff every bounded input results in bounded output. • Condition for BIBO stability • pf): ) • •
) ( BIBO unstable if is unbounded.) • choose • then (note) • BI results in
Asymptotic stability • 입력이 없는 경우 어떤 초기 조건이건 관계없이 • 출력이 0 as t • (Remark) LTI system 일 경우 • BIBO asymptotic stability • Re{pole}<0 • Then, the natural question is how to check the stability without • calculating the poles?
The Routh-Hurwitz Stability Criterion • Consider the characteristic equation of an n-order system : • Routh array :
Case 1. Assume no element in the first column is zero. • The number of positive real roots of a(s) is equal to the number of sign change in first column. • Ex 1) . • Then Routh array is : • There are two positive real roots.
Ex 2) . • ⅰ) If stable • ⅱ) If there are two unstable roots.
Ex 3). If the first column in R-H table is • Number of • Unstable roots : 2 1 4
Case 2. If the first element in one of the rows is zero, including non-zero element in that row. • Ex 4) . • and • there are two unstable roots.
Ex 5) . unstable K.
Case 3. If an entire row of the Routh array is zero. • Ex 6) .
System이 stable한 조건은 • Ex 8)
실제로 • 1) • 2) • “4개의 허수근”+안정근
Now as • “2개의 불안정근”+”2개의 허수근”+안정근 • 확인 :
Relative Stability • s-plane에서 특성방정식의 근들의 실수값이 적어도 보다 좌측에 존재하기를 원할 때, 즉 • Ex) • (HW) 4장 연습문제. 6, 11, 16, 18, 21, 26, 32, 39, 44, 49