Download
1 / 80
820 likes | 1.31k Views
第 5 章 控制系统的设计方法 5.1 控制系统 Bode 图设计方法 一 .Bode 图超前校正设计. 超前校正设计是指利用校正器对数幅频曲线具有正斜率的区段及其相频曲线具有正相移区段的系统校正设计。 这种校正设计方法的突出特点是校正后系统的剪切频率比校正前的大,系统的快速性能得到提高。. 相位超前校正主要用于改善闭环系统的动态特性,对于系统的稳态精度影响较小。. 最大超前角. 最大超前角频率. 处的对数幅值. 由于 α<1 ,因此在 S 平面内极点位于零点左侧。. 复习 《 自动控制原理 》 中关于在系统中串联超前校正装置的特性分析。.

E N D
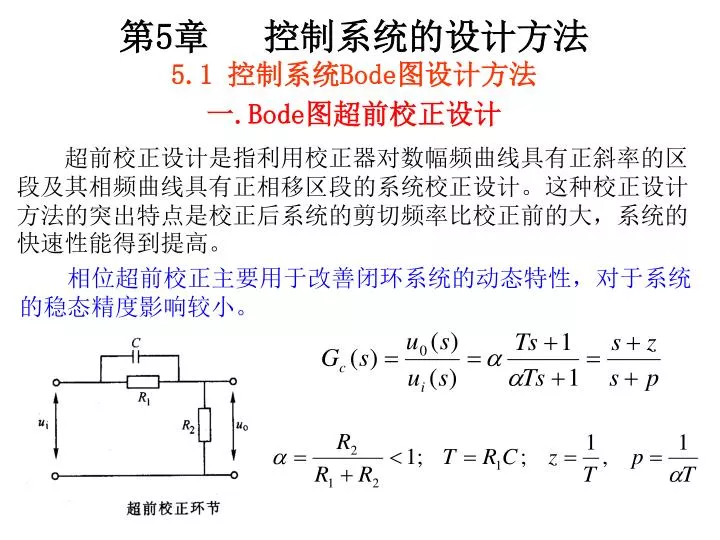
第5章 控制系统的设计方法5.1 控制系统Bode图设计方法一.Bode图超前校正设计 超前校正设计是指利用校正器对数幅频曲线具有正斜率的区段及其相频曲线具有正相移区段的系统校正设计。这种校正设计方法的突出特点是校正后系统的剪切频率比校正前的大,系统的快速性能得到提高。 相位超前校正主要用于改善闭环系统的动态特性,对于系统的稳态精度影响较小。
最大超前角 最大超前角频率 处的对数幅值 由于α<1,因此在S平面内极点位于零点左侧。 复习《自动控制原理》中关于在系统中串联超前校正装置的特性分析。 选自《自动控制原理》 P196教材中选α>1,因此与我们讨论的α<1在零极点数值上有点不同。
时的Bode图和Nyquist图 α=0.5 α=0.1 α=0.1 α=0.5
1)最大超前相位角 与所对应的频率 随α的减小而升高,并有关系式。 2) 处于两个转折频率的几何中心,即。 α=0.1 α=0.5 3) 3)超前校正环节提供的最大相位超前角约在550~650之间。若需要更大的超前角,可以采用多个超前校正环节串联。
实现以上Bode图和Nyquist图的程序(不含图中部分标注)实现以上Bode图和Nyquist图的程序(不含图中部分标注)
【解】 (1)求K0 即被控对象的传递函数为: 【例5-1】已知单位负反馈系统被控对象的传递函数为: 试用Bode图设计方法对系统进行超前串联校正设计,使之满足: (1)在斜坡信号 作用下,系统的稳态误差 (2)系统校正后,相角稳定裕度γ有:43o<γ<48o。
(2) 做原系统的Bode图与阶跃响应曲线,检查是否满足题目要求
图5.2 单闭环系统的单位阶跃响应 由图5.1和图5.2可知系统的: 模稳定裕量Gm≈0.1dB;-π穿越频率ωcg≈100.0s-1; 相稳定裕量Pm≈0.1deg;剪切频率ωcp≈99.5s-1
根据超前校正的原理,可知 ,取 设超前校正器的传递函数为: 为了不改变校正后系统的稳态性能, 中的α已经包含在 中 (3) 求超前校正器的传递函数 根据要求的相稳定裕度γ=45o并附加10o,即取γ=55o。
由: 由 得: 得 计算系统开环对数幅频值。 因为增加超前校正装置后,使剪切频率向右方移动,并且减小了相位裕量,所以要求额外增加相位超前角50~120。参见后图1。为什么? Spline——立方插值函数
由Bode图可知系统的: 模稳定裕量Gm=17.614dB;-π穿越频率ωcg=689.45s-1; 相稳定裕量Pm=48.148deg;剪切频率ωcp=176.57s-1 计算出的相稳定裕量Pm=48.148deg,已经满足题目43o<γ<48o的要求。
(5)计算系统校正后阶跃给定响应曲线及其性能指标(5)计算系统校正后阶跃给定响应曲线及其性能指标
从File的下拉菜单中选中→import选项选择需要仿真的系统。从File的下拉菜单中选中→import选项选择需要仿真的系统。 选择窗口中的sys系统,并用鼠标点击OK
即可得如图画面。若求响应曲线的性能指标,只需在画面中点击鼠标右键,选择“Characteristics”选项,再选择后面的选项得:即可得如图画面。若求响应曲线的性能指标,只需在画面中点击鼠标右键,选择“Characteristics”选项,再选择后面的选项得: 超调量:sigma=25.6% 峰值时间:tp=0.0158s 调节时间:ts=0.0443s
校正后模稳定裕量Gm=17.614 dB 校正后相角裕度 Pm=48.1480 图1
滞后校正环节的传递函数与超前校正环节的传递函数相似,在滞后校正环节中,极点小于零点,即校正环节的极点位于零点的右面。由于加入一个滞后的相位角,它使得系统变得不稳定,因此,如果原系统已经不稳定或相对稳定裕度很小时,不能采用滞后校正。 滞后校正的特点是通过减小系统的总增益,来增大相对稳定裕度。同时,它有利于减小系统的静态误差。 二.Bode图滞后校正设计 相位滞后校正的等效RC网络如图所示。
其传递函数为: 其中: ① 最大相位滞后角所对应的频率 ② 在转折频率 处,校正环节的幅值衰减达到
PID控制器的数学表达式为: 【例5-2】 考虑一个三阶对象模型 研究分别采用P、PI、PD、PID控制策略闭环系统的阶跃响应。 5.2 PID控制器设计一.PID控制器的控制特性
(1) 当只有比例控制时,Kp取值从0.2~2.0变化,变化增量为0.6,则闭环系统的MATLAB程序及阶跃响应曲线如下:
Kp=2.0 Kp=1.4 Kp=0.8 Kp=0.2 由曲线可见,当,Kp增大时,系统响应速度加快,幅值增高。当,Kp达到一定值后,系统将会不稳定。
(2)采用PI控制时(Td→0),令Kp=1,Ti=取值从0.7~1.5变化,变化增量为0.2,则实现该功能的MATLAB程序及闭环阶跃响应曲线为:(2)采用PI控制时(Td→0),令Kp=1,Ti=取值从0.7~1.5变化,变化增量为0.2,则实现该功能的MATLAB程序及闭环阶跃响应曲线为:
Ti=0.7 Ti=0.9 Ti=1.1 Ti=1.5
(3)采用PID控制。令 取值从0.1~2.1变化,变化增量为0.4,则实现该功能的MATLAB程序及闭环响应曲线如下。
Td=0.1 Td=2.1 可见,当Td增大时,系统的响应速度加快,响应峰值提高
二.PID 控制器的参数整定(齐格勒—尼柯尔斯法则) 齐格勒—尼柯尔斯调节法则又简称N-Z规则。
第一种方法 第一种方法也称响应曲线法,是通过实验,求控制对象对单位阶跃输人信号的响应。如图所示。如果控制对象中既不包括积分器,又不包括主导共扼复数极点,则阶跃响应曲线呈S形。如图所示。 如果阶跃响应不是S形,则不能应用此方法
1 显然,PID控制器有一个位于原点的极点和一对位于 的零点。
表中比例度 ,临界比例度 。 2 第二种方法
解: [例5.3] 已知被控对象传递函数为: 试用Z-N两种整定方法确定控制器参数,并绘制阶跃 响应曲线。
根据开环阶跃响应曲线,可以近似的取K=1,τ=5.35,T=20.86-5.35=15.51作为带有延迟的一阶环节模型。根据开环阶跃响应曲线,可以近似的取K=1,τ=5.35,T=20.86-5.35=15.51作为带有延迟的一阶环节模型。
得PID控制器初始参数: kc=4,3 Ti=11.8 Td=2.9
下面介绍一种已知PID初始参数,求最佳PID参数的方法。下面介绍一种已知PID初始参数,求最佳PID参数的方法。 参见教材P136~P141 对于[例5.3],在给定PID初始参数kc=4.3,Ti=11.8,Td=2.9时
三.基于双闭环PID控制的一阶倒立摆控制系统设计三.基于双闭环PID控制的一阶倒立摆控制系统设计 由第2章可知:对象模型 1 1)一阶倒立摆精确模型为:
F(s) θ(s) X(s) 一阶倒立摆系统动态结构图 2)若只考虑θ在其工作点附近θ0=0附近(-100<θ<100)的细微变化,则可以近似认为:
电动机、驱动器及机械传动装置的模型 假设:选用日本松下电工MSMA021型小惯量交流伺服电动机,其有关参数如下: 驱动电压:U=0~100V 额定功率:PN=200W 额定转速:n=3000r/min 转动惯量:J=3×10-6kg.m2 额定转矩:TN=0.64Nm 最大转矩:TM=1.91Nm 电磁时间常数:Tl=0.001s 电机时间常数:TM=0.003s 经传动机构变速后输出的拖动力为:F=0~16N;与其配套的驱动器为:MSDA021A1A,控制电压:UDA=0~±10V。 若忽略电动机的空载转矩和系统摩擦,就可以认为驱动器和机械传动装置均为纯比例环节,并假设这两个环节的增益分别为Kd和Km。
F(s) θ(s) X(s) 一阶倒立摆系统动态结构图 模型验证 尽管上述数学模型是经过机理建模得出,但其准确性(或正确性)还需要运用一定的理论与方法加以验证,以保证以其为基础的仿真实验的有效性。 双闭环PID控制器设计
剩下的问题就是如何确定控制器 的结构和参数。