Download
1 / 11
110 likes | 119 Views
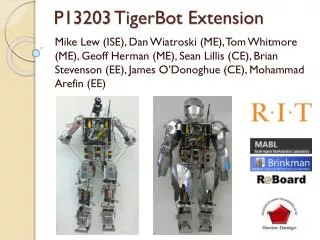
P17201 - TigerBot VII Project Definition Review 12-Sep-2016. Slide Title. Body. P17201 - TigerBot VII Team. Bryan Harper - Electrical Engineering Manager August Mintz - Mechanical Engineering Manager

E N D
P17201 - TigerBot VII Project Definition Review 12-Sep-2016
Slide Title Body
P17201 - TigerBot VII Team Bryan Harper - Electrical Engineering Manager August Mintz - Mechanical Engineering Manager Dan Watson - Power Electronics / Purchasing John Grischuk - Structural Design Engineer Felisa Sze - Electrical/Software Design Engineer Collin Mason - Electromechanical Integration
Team Vision and Project Summary Summary • Phase 7 of ongoing TigerBot humanoid robot design project. • The long term goal: Create a human scale robot capable of giving tours of RIT’s campus • Previous iteration produced the lower half of the system. • This year, the team will assess the previous design and determine whether to: • Design and build the upper half • Make key electrical and mechanical improvements to the lower half • The short term goal of this phase is to produce a robot with “turn key” style operation for use in the robotics lab and for demonstrations. Vision • Complete a review of TigerBot VI’s electrical and mechanical systems. • Assess the feasibility of moving on to the upper body design or improving the lower body. • Complete research key to making proper design assessments.
Project Goals and Key Deliverables The main goal of the 7th phase of TigerBot is to create a full scale humanoid robot that has a turn-key operation mode for demonstration as well as a robust design focused on improving TigerBot VI and enhancing testing capabilities. Deliverables • An in depth design review of the TigerBot VI design will be delivered by the end of the project planning phase. • An in depth electrical, mechanical and software design based on the findings of the design review will be delivered by the end of Multidisciplinary Senior Design 1. • A platform that is ready for extensive testing will be delivered by the 8th week of MSD2. • A product with a simple demonstration mode as well as a robust infrastructure open for future improvements will be delivered by the end of MSD2.
Use Cases RIT TigerBot Demo at Imagine RIT RIT TigerBot Tour
Constraints • Center of gravity must be below waist • Low center of gravity makes it much easier to balance robot • Motors, servos, gearboxes, and actuators must exist on the market • Custom mechanical drivers would add unnecessary complexity • Main control of the robot must be in a small-factor computer with embedded OS, C/C+ compiler • Single point of control allows for easier reprogramming • Limbs must be wired with accelerometers and gyroscopes at each appendage • Sensor feedback enables reactive movement for balance correction
Engineering Requirements Additional Goals