Download
1 / 12
120 likes | 214 Views
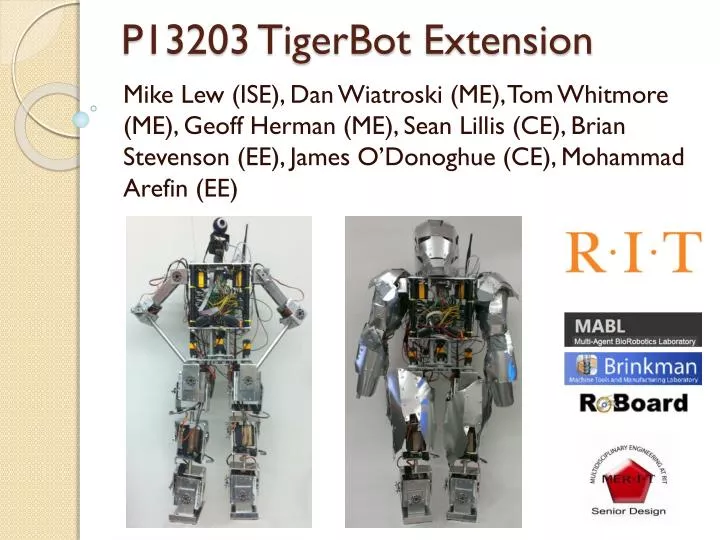
P13203 TigerBot Extension. Mike Lew (ISE), Dan Wiatroski (ME), Tom Whitmore (ME), Geoff Herman (ME ), Sean Lillis (CE), Brian Stevenson (EE), James O’Donoghue (CE), Mohammad Arefin (EE). Agenda. Project Objectives Previous Models Shell Design Mechanical Design Electrical Design

E N D
P13203 TigerBotExtension Mike Lew (ISE), Dan Wiatroski (ME), Tom Whitmore (ME), Geoff Herman (ME), Sean Lillis (CE), Brian Stevenson (EE), James O’Donoghue (CE), Mohammad Arefin (EE)
Agenda • Project Objectives • Previous Models • Shell Design • Mechanical Design • Electrical Design • Computer Design • Questions
Project Objectives • Design and build a humanoid robot platform, with human-like proportions and movement, capable of interacting with people and its surroundings. • Walk in straight line, and turn • Autonomous, untethered operation for up to 30 minutes • Capable of balancing in stationary standing position • Support 125% of total robot weight • Obstacle avoidance capable • Voice activated • Able to recover and upright self after a fall • Durable enough to withstand a fall
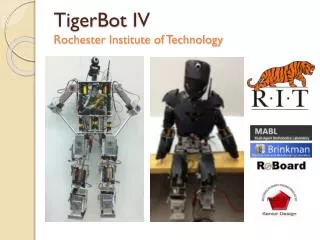
Previous Models TigerBot TigerBot 2 TigerBot 3
Shell Design • Shell modeled after “Ironman” for aesthetics and to protect internal electrical/computer components • Designed using Pepakura software • Made from 0.016” aluminum to be as light as possible while still providing sufficient protection Head Design Front Chest Back Plate Component Layout
Mechanical Design • 23 Rotational Degrees of Freedom (4 per arm, 6 per leg, 1 in torso, 2 in head) • Full load bearing joint design at every axis of rotation, allowing completely free and unrestricted servo rotation • Servo motors take no structural loads, and therefore are easily removable from joints • Shoulder height of 26” with all dimensions proportional to actual human subject • Projected total mass of 8.5 kg (~18.75 lbs), Actual mass without shell of 18.5 lbs • Low center of gravity to assist functionality (~2” below pelvis plate) • Combination of higher torque XQ-S56 servos (legs) and Roboard RS1270 servos (upper body) based on joint torque requirements
Mechanical Design Complete CAD Model (SolidWorks)
Mechanical Design Elbow – Close Up Knee - Exploded View
Electrical Design • Custom PCB designed to distribute battery power • Proper voltage distribution to all components • Added fuse and switches for protection • Low battery indicator • I2C communication capability Custom PCB - Powerboard
Electrical Design • Custom PCB designed for measuring currents drawn by each servo • Capable of sensing current for 25 servos at once • Uses “Hall Effect” current sensors, providing low power consumption Custom PCB – Current Sensing
Computer Design • 32-bit Roboard Vortex86 CPU with 256MB DDR2 RAM and 16GB Class 10 SD Card running Ubuntu • ATmega2560 Arduino with 16 analog input ports • 9-Axis IMU (Accelerometer, Magnetometer, and Gryoscope) • EasyVRVoice Recognition with 26 pre-programmed commands and up to 9 minutes of audio playback Roboard RB-100 CPU 9-Axis IMU EasyVR Voice Recognition