Download

1 / 8
80 likes | 205 Views
TigerBot Platform. Kyle Backer (EE), Jeremy Jensen (ME), Matthew DeCapua (EE), Eric Walkama (ME), Mike Thomas (EE), Jonathan Cormier (CE), John Seybold (CE). Walk Turn Object Avoidance Get up from Fall, Forwards and Backwards Resist Fall Voice Activated Non-Tethered

E N D
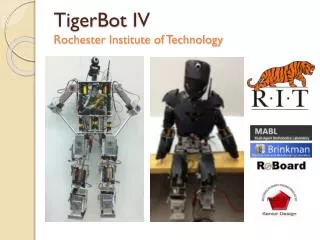
TigerBot Platform Kyle Backer (EE), Jeremy Jensen (ME), Matthew DeCapua (EE), Eric Walkama (ME), Mike Thomas (EE), Jonathan Cormier (CE), John Seybold (CE)
Walk • Turn • Object Avoidance • Get up from Fall, Forwards and Backwards • Resist Fall • Voice Activated • Non-Tethered • >2ft Tall, Carry 25% of body weight • Represent Human Proportions and Movement • Shelf Parts • Adequate Computational Power Costumer Needs
~2ft Tall and Carry 25% of Body Weight • 6 DOF per Leg • 4 DOF per Arm • 2 DOF in Neck • Rotation in Hip (Torso Twist 45%) • RoBoard Standard Size Servos in Joints • 486 oz-in @ 7.4V, .11 sec/60°, 70g • Aluminum Skeleton Engineering SpecificationsMechanical Body
Inadequate Torque • Low Impact Resistance During Fall • Weak Hip Rotation Joint • Too Heavy, 25% weight Spec. Risks