Download
1 / 15
150 likes | 247 Views
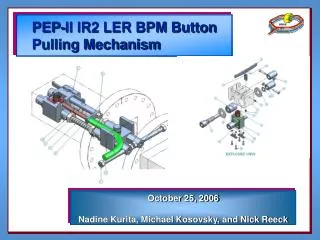
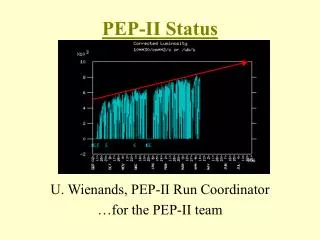
PEP-II IR2 alignment. S.Ecklund, C.LeCocq, R.Pushor, R.Ruland, A.Seryi, Z.Wolf With big help from A.Acosta, F.Brown, R.Chestnut, A.Chupyra 1 , B.Dix, C.Dudley, T.Himel, D.Jensen, M.Kondaurov 1 , T.Lahey, B.Myers, M.Petree, J.Seeman, U.Wienands, M.Zurawel, et al. ( 1 BINP)

E N D
PEP-II IR2 alignment S.Ecklund, C.LeCocq, R.Pushor, R.Ruland, A.Seryi, Z.Wolf With big help from A.Acosta, F.Brown, R.Chestnut, A.Chupyra1, B.Dix, C.Dudley, T.Himel, D.Jensen, M.Kondaurov1, T.Lahey, B.Myers, M.Petree, J.Seeman, U.Wienands, M.Zurawel, et al. (1 BINP) PEP-II MAC meeting, October 2003
Event flow • Motivations • IR orbit correctors show correlation with current – IR magnets move? • Spring 2003 => tiltmeters installed on IR quads observe motion correlated with current • SR heating vacuum chamber => expansion => push magnets • August 2003 : decided to install new systems in IR • Hydrostatic level system • Stretched wire system • Laser tracker system • This talk: • Data from 3 systems => reconstruction of IR magnet motion • Next: • Orbit motion modeling, optimization of orbit correction or feedforward. Possibly, cure the cause of motion Consider only vertical motion. Horizontal data, and data from laser tracker are being analyzed and are not discussed in this talk.
Left A Backward <= e+ Stretched wire. Sensors. Hydrostatic sensors Tiltmeters
Right B Forward <= e+ Laser tracker Tiltmeters Hydrostatic sensors
Left side. Stretched wire system. Q5 Q4 Hydro sensors
Targets Laser tracker Right side. Q5 Q4 Hydro sensors on the raft. Tiltmeters
IR magnet motion – “hydro” dataThe left raft motion is correlated with current(s), but not much the right raft. Slope is changing more significantly than the center of Q5 position. IR Motion expressed as a vertical slope (pitch) and position of the raft Slope: positive slope = end of raft closer to IP lifts up. Raft position is recalculated to the center of Q5 quad (positive position means the raft is higher). Horizontal axis => day of 2003.
Left side moves significantly more than the right one, the motion is correlated with current (mostly LER), is observed by hydro, wire and tiltmeter systems, and correlates with IR orbit feedback signals
Left Right Left Right Raw data Left side motion is caused primarily by LER– whose SR shines onto the left side Correlation with LER current easier to see in the moments of different behavior of LER and HER currents
Reconstruction of IR motion • Left side moves most • Were lucky to install wire on the left side! • Hydro system on the raft, wire and titmeters on magnets allow to reconstruct motion of magnets • Is there only common pitch of the raft and no magnet motion relative to the raft? • Considered and rejected as unsupported by data • Is there transverse flexibility between Q2 and Q1 that would affect wire data? • Considered and rejected. Q2-Q1 is rigid transversely • Shown below is a preliminary but consistent model of IR magnet motion
Left raft IR magnet motion model Model: on top of hydro data (motion of raft as a whole) add relative motion to be consistent with wire and tiltmeters. Example of magnet position for two extremes. The raft pitch change by about 30 mrad, the magnet position change by about 120 mm. Most of deformation occur near Q2.
Left raft motion model details of the fit to wire data Measured wire data Modeled wire data Model: use common pitch of the left raft, + relative on raft motion, dependent on the common pitch, to predict and make best fit to the stretched wire data.
Left raft motion modeldetails of the fit to tiltmeter data Measured tiltmeter data Modeled tiltmeter data Model: use common pitch of the left raft, + relative on raft motion, dependent on the common pitch, to predict and make best fit to the tiltmeters data.
Left IR magnet motion model AVI GIF
Summary and next steps • Installation of new alignment monitoring systems in IR-2 allowed to determine details of IR magnet motion • Most of the fast (current-correlated) motion is on the left raft, due to LER SR, supposedly heating chamber near Q2 • Next step is orbit modeling and optimization of orbit correction and location of correctors. Possibly, with use of feedforward from alignment systems. • Can this motion be cured? • Re-steer orbit? (but there are many restrictions on orbit position…) • Mechanical design modification? • …