Download

1 / 20
200 likes | 323 Views
Open-source unmanned aircraft system. Advisors: Prof. Hammer Prof. Ernie. Group Members: Shuohan Wan Dustin Douglas Kevin Oberg. Sponsor: Lockheed-Martin. Project Goals. Open-source (GPL) autopilot on RC Plane Autopilot- Tiny v2.11 RC Plane- Multiplex FunJet Create project handbook

E N D
Open-source unmanned aircraft system Advisors: Prof. Hammer Prof. Ernie Group Members: Shuohan Wan Dustin Douglas Kevin Oberg Sponsor: Lockheed-Martin
Project Goals • Open-source (GPL) autopilot on RC Plane • Autopilot- Tiny v2.11 • RC Plane- Multiplex FunJet • Create project handbook • Contains step-by-step simplified details necessary to recreate project in less time • Understandable to the average engineer • Assist two Aerospace Engineer teams • These AEM teams handle the physical planes • We help with all necessary electrical needs
Goal Specifics • FunJet plane requires configuration of a number of components • AutoPilot Control Board • Battery • Radio-modem and antenna • GPS receiver • IR sensors for X-, Y-, and Z-axes • Motor and controller • RC receiver and antenna • Servos • International Traffic in Arms Regulations (ITAR) • Open-source (GPL) necessary to be able to sell in international markets
Prior Work • Many types of commercial and enthusiast autopilots available • Paparazzi already deployed on FunJets as well as other airframes • Not well documented • Paparazzi Wiki • Useful for general info • Fails to provide some specifics
Requirement Specifications • Successfully fly* the Multiplex FunJet under autopilot control (uses elevons) • After flying FunJet, fly aircraft with traditional configuration (ailerons, elevator, rudder) * Successful flight test entails manual takeoff and landing with autonomous flight by wire controlled by a PC ground station
Requirement Specifications (2) • Aerospace Engineering teams support • We need to assist these two teams with any electrical or software related difficulties they encounter • Manual • Professor Hammer would like to have a detailed handbook that walks through the process • Stretch goals • Autonomous takeoff/landing • Video/Picture feedback • Multiple aircraft flying simultaneously • Build/Fly our own FunJet
Proposed Solution • Conventional R/C electronics • Receiver • Servos • Motor/ESC • Battery • Paparazzi Equipment • Tiny v2.11 • IR sensors • Modem
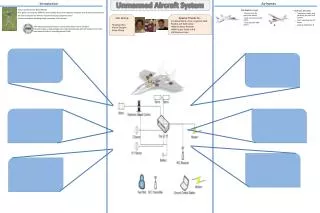
Proposed Solution Cont. • Conventional R/C Functional Diagram
Proposed Solution Cont. • Paparazzi Augmented R/C Functional Diagram
Proposed Solution Cont. • Tiny v2.11 becomes the heart • Everything is directly connected • R/C receiver is auxiliary communication • Serves as backup communication device
Proposed Solution Cont. • Manual R/C control • Takeoffs • Landings • Modem failure • Tiny v2.11 control • Autonomous flight (Auto 2) • Semi-autonomous flight (Auto 1) • Fly by wire (air) through GCS
Budget/Costs • Majority of budget spent on pre-crimped wires • Pre-crimped wire ~$30 per plane • Crimper would cost ~$250 if bought separately • The connector, 3-8 pin, cost ~$5 per plane • Parts provided by Lockheed Martin • Multiplex FunJet ~$75 • IR sensors ~$70 • RF Modem ~$200 • Servos/receiver~$80 • Motor/ESC~$110
Timeline • 10/11 – FunJet manual flight • 10/25 – FunJet autonomous flight • 10/25 – Trainer manual flight • 11/2 – Trainer autonomous flight • 12/8 – Implement advanced features • Camera • Interface paparazzi with AEM flight simulator • 12/8 – Final draft of Paparazzi Handbook
Summary • We are making good progress towards our autonomous flight goal • Most electrical issues have been dealt with • We are learning
Special thanks to… Reid Plumbo, Todd Colten, Jeff Hammer AEM Paparazzi Team A: Jacob Rohrer, Peter Rohrer, Ben Bradley, Richard Schiell AEM Paparazzi Team B: Ben Bradley, Nate Olson, Pat O’Gara, Sean Jarvie
Flying Fields • SPRC in Ham Lake
Resources • Lockheed Engineers • Reid Plumbo • Todd Colten • Professor Hammer • AEM Team A & B
Board Flashing • Step 1: Flash bootloader using special cable • Step 2: Flash GPS tunnel using USB programming cable • Step 3: Program GPS using U-BLOX software and special cable • Step 4: Flash autopilot program using USB programming cable