Download
1 / 21
210 likes | 314 Views
Leashing of an Unmanned Aircraft to a Radio Source. CDC-ECC Seville, Spain Dec. 13, 2005 Cory Dixon & Eric W. Frew R esearch and E ngineering C enter for U nmanned V ehicles University of Colorado Boulder, CO.

E N D
Leashing of an Unmanned Aircraft to a Radio Source CDC-ECC Seville, Spain Dec. 13, 2005 Cory Dixon & Eric W. Frew Research and Engineering Center for Unmanned Vehicles University of Colorado Boulder, CO
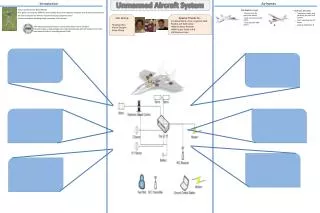
Radio Leashing: maintaining a communication link between a UAV and another mobile network node based on locally measured communication performance metrics. Leashing Problem • Leashing Goals • Maintain communication with a mobile base station in an unknown environment • Increase communication range of base station using UAV as airborne relay • Maximize ground coverage for on board sensors • Leashing Applications • Communication in mountainous terrain, e.g. wildland firefighting • Perimeter surveillance • Stand-off tracking of ground vehicles Cory Dixon University of Colorado
Networked Control Systems (NCS) Distributed Cooperative Control Team Team Network Network Control Control Performance Performance MANETS Fault Tolerant Networks Swarm Intelligence Formation Flying Vehicle Vehicle Network Network Mobility Mobility Topology Topology Data Ferrying Mobile Infostations Communications & Control:Joint Analysis and Design Communication performance and vehicle mobility control form a closed loop system which suggests the joint analysis and design of communication and control systems for cooperative teams. Cory Dixon University of Colorado
AUGNet:Ad Hoc UAV Ground Network http://AUGNet.Colorado.EDU 802.11b Node Ares UAVs Table Mountain (15 km north of CU) Cory Dixon University of Colorado
Tracking a Communication Performance Metric • Maintain communication link? • Traditionally (position based): R ≤ RMAX • Communication performance motivated: T ≥ TMIN • Communication Performance Field • Can view performance as a continuous, measurable field • Field does not require any assumptions of distribution shape Performance Field Position Based • Leashing Objectives • T ≥ TMIN defines a region of acceptable communication performance • Maximizing sensor coverage reduces region to outer bound Leashing is equivalent to tracking a level set of the performance field. Cory Dixon University of Colorado
References & Related Work • Communication as Control Primitive • Controlled mobility to Improve Network Performance (Goldenberg et al., 2004) • Connectivity & Limited Range Communications (Beard and McLain, 2003) (Spanos & Murray, 2004) • Vehicle Control in a Sampled Environment • Cooperative Level Set Tracking (Boundary Tracking) (Hsieh et al., 2004), (Marthaler & Bertozzi, 2003) • Cooperative Gradient Climbing (Bachmayer et al., 2002), (Ogren et al., 2004) • Adaptive Sampling Utilizing Vehicle Motion (Fiorelli et al., 2003) • Path (Route) Tracking for Nonholonomic Vehicles • Optimal Control of Bounded-Curvature Vehicles (Soures et al., 2000) (Balluchi et al., 2005) Cory Dixon University of Colorado
Solution:Leashing Controller • Communication Performance as a Control Primitive • Integrate communication performance into control architecture • Exploit mobility control to maintain communication performance • Closed Loop SNR Tracking Controller • Use the SNR as the feedback signal • Generate bounded steering commands for autopilot Cory Dixon University of Colorado
Overview • Introduction & Motivation • Problem Setup and Simulation Results • Conclusion Cory Dixon University of Colorado
Problem Setup • UAV Motion – Dubin’s Car Model • 0< VMIN ≤ VT≤ VMAX • Steering input: |w| ≤ wMAX • Discrete Control System • Discrete measurements of SNR taken at Ts • Steering commands sent to autopilot at Tc • SNRdesired determined by external, high-level system • Radio Environment • Relative position of radio node is not known • SNR field properties are unknown to controller • It is assumed that localized noise sources will be present • Radio on board UAV provides a local SNR measurement, i.e. no direct gradient information is available Cory Dixon University of Colorado
Signal-to-Noise Ratio • Radio Propagation Environment • Received power is directional and link dependent • Interference is dependent upon the location of the UAV • Fast fading (noisy channel) • Shannon Channel Capacity • Empirical Throughput Model (Rappaport, 2004) Throughput vs. Range Radio Environment Communication Range Cory Dixon University of Colorado
Lyapunov Based Controller G. Casalino, M. Aicardi, A. Bicchi, and A. Balestrino, “Closed Loop Steering and Path Following for Unicycle-like Vehicles: a Simple Lyapunov Function based Approach.” IEEE Robotics and Automation Magazine, 2(1):27-35, March 1995. • Represent kinematic equations w.r.t. a tracking frame that moves along a known level set curve • Lyapunov Function • Steering Controller Simulation Example Cory Dixon University of Colorado
SNR Path Gradient Discrete Sampling Time SNR Gradient Field Path Gradient * = Cory Dixon University of Colorado
Constant SNR Orbit • Feedback Error Signal • Discrete Time Steering Controller • Tracking frame angle errors • Correlation to Lyapunov controller Small Angle Assumption Keeps the UAV on a level set Puts the UAV on the desired level set Cory Dixon University of Colorado
Feedback Error Signal Reform into a geometric angle measure using the Path Gradient DSmax Largest measured change in SNR Obtained by performing an initial turn Should be updated on-line Discrete Time Steering Controller SNR Gradient Ascent Cory Dixon University of Colorado
Tracking Simulations Bang-Bang* Leashing Lyapunov * M. Kemp, A.L. Bertozzi, D. Marthaler, “Multi-UUV Perimeter Surveillance”, edited by C., Brancart, E. An, M. Benjamin (2004) (IEEE OES Workshop on Multiple AUV Operations) Sebasco Estates, Maine. Cory Dixon University of Colorado
Performance Comparison Cory Dixon University of Colorado
Overview • Introduction & Motivation • Problem Setup and Simulation Results • Conclusion & Future Work Cory Dixon University of Colorado
Future Work • Stability & Sensitivity • Simulations have shown the controller to be stable, but a formal proof is still required • Wireless communication channels are noisy (fast fading) and will require the SNR signal to be smoothed • Effects of node mobility and external disturbances (wind) • Estimation of SNR (performance) field • Estimate the gradient vector to improve tracking performance • Radio source localization • Noise source detection and localization • Deployment • Integrate into AUGNet testbed • Demonstrate electronic leashing for mobile node Cory Dixon University of Colorado
Extension to Multiple Nodes Energy Optimal Placement a = 2 a > 2 q p a∞ Cory Dixon University of Colorado
Conclusion • Leashing Problem • Increase communication range of a base station by using a UAV as an airborne relay node • Maximize UAV sensor coverage while maintaining performance of communication link • SNR as Control Input • Provides a robust measure of link quality and bandwidth • Provides a performance signal for feedback control • Does not require any additional information sharing, only that the nodes are communicating • Leashing Controller • Generates smooth steering commands to track a SNR level set curve • Does not require knowledge of the field or gradient • Comparable tracking performance to Lyapunov controller Cory Dixon University of Colorado
http://RECUV.Colorado.EDU Questions and Comments are Welcomed! Thanks for coming! Cory.Dixon@Colorado.EDU Cory Dixon University of Colorado