Download
1 / 21
230 likes | 417 Views
Processo. Atuação. Medição. Controle. Sistemas de Controle. Definições Medição Responsável pela transformação da grandeza que se deseja controlar num sinal que possa ser manipulado pelo sistema de controle.

E N D
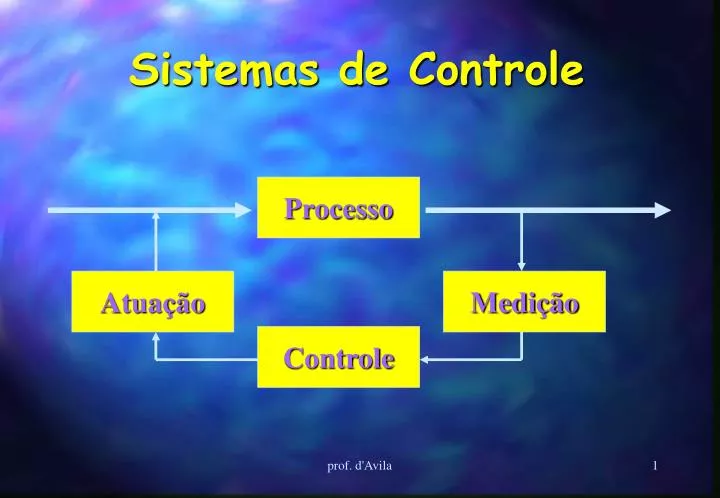
Processo Atuação Medição Controle Sistemas de Controle prof. d'Avila
Definições Medição Responsável pela transformação da grandeza que se deseja controlar num sinal que possa ser manipulado pelo sistema de controle. Atuação Responsável pela transformação do sinal de saída do controlador no sinal que possa comandar a variável de entrada do sistema que está sob controle.
Processo Operação que evolui progressivamente e que se constitui por uma série de ações controladas objetivando um particular resultado. Controle realimentado É uma operação que na presença de distúrbios , tende a reduzir a diferença entre a saída de um sistema e a entrada de referência. prof. d'Avila
Controle Automático Processo Atuador Medição Interfaces CPU Memórias Saídas Entradas prof. d'Avila
Automação Industrial • Conjunto de técnicas destinadas a tornar automáticos vários processos numa indústria. • Comando Numérico • Controlador Programável • Sistemas CAD/CAM prof. d'Avila
Contatores e Reléscontatos eletromecânicos • Desvantagens • Fadiga e desgaste dos contatos eletromecânicos • Velocidade limitada • Grandes Gabinetes e painéis de lógica • Pouco flexível à alterações de lógica
Processadores Conceitos Básicos Tem como função, coletar os dados dos cartões de entrada de um CP, efetuar o processamento conforme o programa armazenado na memória, e enviar ao cartões de saída como resposta ao processamento
Unidade Central de Processamento • Os fabricantes de CP utilizam dois tipos de componentes para o papel de UCP: • Microprocessador • Necessita de componentes periféricos para a sua operacionalização. • Microcontrolador • Contém incorporado a UCP, memória RAM, ROM, interface serial, paralela, contador, temporizador, circuito oscilador, etc. prof. d'Avila
Controlador Programável Equipamentos eletrônicos programáveis destinados a substituir sistemas controlados por dispositivos eletromecânicos
Características básicas de um Controlador Programável • Hardware de controle de fácil e rápida programação ou reprogramação, com a mínima interrupção da produção; • Capacidade de operação em ambiente industrial; • Sinalizadores de estado e módulos do tipo plug-in de fácil manutenção e substituição; • Hardware ocupando espaço reduzido e apresentando baixo consumo de energia;
Características básicas de um CP Possibilidade de monitoração do estado e operação do processo ou sistema; Compatibilidade com diferentes tipos de sinais de entrada e saída; Capacidade de alimentar, de forma contínua ou chaveada, cargas que consomem correntes de até 2A; Hardware de controle que permite a expansão dos diversos tipos de módulos, de acordo com a necessidade;
Características básicas de um CP Custo de compra e instalação competitivo em relação aos sistemas de controle convencionais; Possibilidade de expansão da capacidade de memória; Conexão com outros CPs através de rede de comunicação. prof. d'Avila
Histórico dos CP’s • Década de 60 - surgimento na indústria automobilistica americana para substituição de painéis de relés. • Necessidades: • Menor espaço • Maior confiabilidade • Maior flexibilidade • Década de 70 - surgimento do microprocessador. • Aumento das capacidades • Variáveis analógicas • Instruções aritméticas • Armazenamento de dados (controle de produção) • Década de 80/90- avanços na microeletrônica. • Processadores mais velozes: • Capacidade de comunicação (redes de Alta Velocidade) • Linguagens Estruturadas • Multiprocessamento
Vantagens do uso do CP Menor espaço ocupado Menor potência elétrica requerida Reutilização Programabilidade Confiabilidade Manutenção simplificada (autodiagnose) Flexibilidade Projeto de sistemas mais rápido Conexão com sistemas de supervisão e controle prof. d'Avila
Conceitos Básicos de CP • Ponto de Entrada Sinal recebido pelo CP, a partir de dispositivos ou componentes externos (sensores) como micro chaves, botões, termopares, etc. • Ponto de Saída Sinal produzido pelo CP para acionar dispositivos ou componentes externos (atuadores) como lâmpadas, motores, solenóides, etc. • Programa • Lógica existente entre os pontos de entrada e de saída que executa as funções desejadas. prof. d'Avila
_ + Acoplamento Mecânico Eixo do Potenciômetro e engrenagem Sistema Controlador de Posição Servo Posicionador prof. d'Avila
v1 + vo _ v2 Amplificador Operacional vo = A (v+ - v-) v1= Tensão Aplicada à Entrada Não Inversora v2 = Tensão Aplicada à Entrada Inversora A = Ganho de Tensão em Malha Aberta vo = Tensão de Saída
v+ + vo _ v- Fonte Simétrica V+ V- V+ = Tensão de Alimentação Positiva V- = Tensão de Alimentação Negativa
R2 Vi R1 _ Vo + Vo = - ( R2 / R1 ) Vi Amplificador Inversor
+ R1 _ R2 Amplificador Não-inversor Vo = (1 + R2 / R1 ) Vi