Download
1 / 20
220 likes | 334 Views
Microwave Distance Sensor. Randy Shirts ECE 5320 Mechatronics Assignment #1. Outline. Reference list Major Applications Basic principle Typical configuration Specifications Limitations Choosing a sensor Cost & Availability. Reference List. www.radatec.com/radatec/products2.html

E N D
Microwave Distance Sensor Randy Shirts ECE 5320 Mechatronics Assignment #1
Outline • Reference list • Major Applications • Basic principle • Typical configuration • Specifications • Limitations • Choosing a sensor • Cost & Availability
Reference List • www.radatec.com/radatec/products2.html • www.sensorsmag.com/articles/1299/50_1299/main.shtml • www.sensorsmag.com/articles/1299/34_1299/main.shtml • data.engin.umich.edu/faculty_staff/faculty/Ruf/index.html • ccrs.nrcan.gc.ca/resource/tutor/fundam/chapter3/01_e.php • www.crisp.nus.edu.sg/~research/tutorial/mw.htm • nsidc.org/data/docs/daac/nsidc0165_clpx_gbmr/
Further References • http://ccrs.nrcan.gc.ca/resource/tutor/fundam/chapter3/01_e.php • http://www.crisp.nus.edu.sg/~research/tutorial/mw.htm • http://www.radatec.com • www.sensorsmag.com/articles/1299/34_1299/main.shtml
Active Sensors When the distance between sensor and the measuring surface are large. Such as train speed control and heavy equipment testing Vehicle speed and position In very harsh conditions. Such as a distance measurement in an engine Passive Sensors Meteorology Hydrology Oceanography Major Applications
Basic Working Principle • Active Sensors (Close Range) • Active Sensors (Long Range) • Passive Sensors
Active Sensors (Large Distances) • Noncontact microwave sensors, or radar, sensors are based on the Doppler effect. Using the frequency shift of a wave reflected from a moving surface, microwave sensors are able to calculate speed and distance.
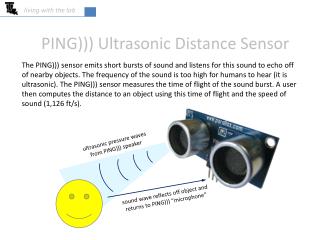
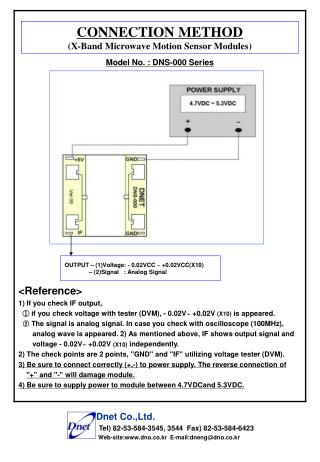
Active Sensors (Small Distances) • The schematic below shows how the technology works. • First, a radio wave is emitted from the microwave sensor and impinges on the vibrating object. • The signal is reflected and sensed in the radio receiver embedded in the sensor. • This signal is then acted on by specialized electronics and an algorithm that converts the electrical signal to a calibrated measure of displacement. • The measured distances resulting from these techniques are on the order of microns, not miles.
Passive Sensors • All objects emit microwave energy of some magnitude, but the amounts are generally very small. A passive microwave sensor detects the naturally emitted microwave energy within its field of view. This emitted energy is related to the temperature and moisture properties of the emitting object or surface. Passive microwave sensors are typically radiometers or scanners and operate in much the same manner as active microwave sensors except that an antenna is used to detect and record the microwave energy. • The microwave energy recorded by a passive sensor can be emitted by the atmosphere (1), reflected from the surface (2), emitted from the surface (3), or transmitted from the subsurface (4). Because the wavelengths are so long, the energy available is quite small compared to optical wavelengths. Thus, the fields of view must be large to detect enough energy to record a signal. Most passive microwave sensors are therefore characterized by low spatial resolution.
Aircraft Turbine Health Monitoring • Waveforms of blade profile, comprised of distance measurements across blade tip as it passes the sensor at 18,000 rpm. • The R2000 Displacement Sensor measures displacement by launching a continuous-wave microwave signal towards a target of interest and comparing the received signal with the transmitted signal. • The sensor extracts information on the target movement from the return signal.
The first figure represents profiles of blade taken over time. The variability in blade length for this blade is representative of normal blades. • The second figure represents a blade with an abnormal amount of length variability due to previously undetectable fatigue in the blade root. • This system is used to predict failures in turbine blades, disks, and rotors for jet aircraft turbines. The environment involves blades rotating at 18,000 rpm within flaming natural gas, carbon, oil and other contaminants. The system employed is comprised of the 2000∫F high temp cylindrical probe, nickel alloy cable, and high speed data acquisition electronics. For this application, the system takes data at 25 MHz and provides a data point every 0.0007î across each blade on each revolution. These data-rich waveforms enable maintenance personnel to predict blade creep fatigue, blade cracking, disk cracking, and other catastrophic failures
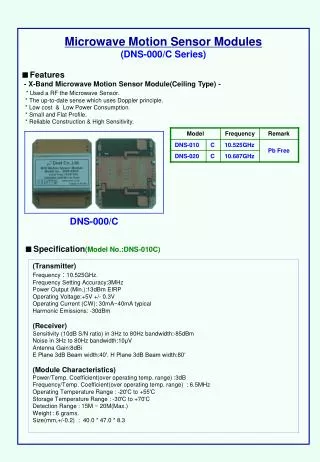
Microwave Motion Sensors forOff-Road Vehicle Velocity Data and Collision Avoidance • Ground Speed Measurement The conventional way to determine ground speed is to measure a wheel's rotational velocity and compute the speed based on the circumference of the tire. There are two problems with this method. First, calibration depends on the type and age of the tire; second, wheel slippage depends on soil conditions and the load on the vehicle. Wheel slippage can average 20%--25% in the field, although 11%--14% is optimum for the stress on the vehicle and soil compaction [2]. To help tractor operators optimize vehicle performance, John Deere has developed a unit that incorporates a microwave sensor with a wheel tachometer to calculate wheel slippage. This unit also provides true ground speed. According to an extensive study by California Polytechnic State University at San Luis Obispo, there is no correlation between wheel slippage and true ground speed [3].
Environmental Specifications. Any sensor designed to be used in the agricultural environment must meet stringent specifications for resistance to vibration, salt spray, high humidity, fertilizers, pesticides, and so on. A group of specifications has been developed to address this requirement , among them: • Operating voltage: 10 VDC–16 VDC • Power consumption: <500 mA • Operating temperature: –40°C to 85°C • Overvoltage: 24 VDC • Reverse protection: –24 VDC • Dust: Per SAE J1211 • Salt spray: 48 hr • Mechanical shock: 25 shocks at 23 g 27 • Mechanical vibration: Mil Std 202E, Method 201A • Humidity: Per SAE J1211 • EMC emissions: FFC part 15 Microwave SensorsMicrowave velocity sensors successfully meet these specifications. They are unaffected by environmental conditions and provide a reliable measure of true ground speed by using the Doppler principle. The Doppler frequency, which is proportional to velocity, is given by the formula: • Fd = (2FoVcos(theta) ) / c • Fd = Doppler frequency • Fo = microwave oscillator frequency • V = vehicle horizontal velocity • c = speed of light • theta = angle between sensor and ground • Assuming a microwave oscillator frequency of 24.125 GHz gives: Fd = 160.83 V/cos(theta) in Hz/M/s (2) • 24.125 GHz was chosen as the microwave oscillator for several reasons: • Transceivers based on this frequency are used in microwave door openers and are available in quantity at a reasonable price. • 24.125 GHz transceivers are already qualified to, and comply with, FCC regulations. In other words, operators are not required to obtain a separate license for each unit. • The frequency simplifies fabricating a narrow-beam antenna, which reduces errors caused by beam dispersion. A frequency of 10.525 GHz could also have been used. Although it is less expensive, it must be physically larger to achieve the same performance.
TOPEX Altimeter Sensor/Instrument • TOPEX/Poseidon (T/P) is a joint NASA/CNES mission which images global distributions of sea level with unprecedented accuracy and precision. The primary instruments are radar altimeters designed to determine the radial distance between the satellite and the ocean surface by a precise measurement of the round trip time of flight of the radar signal. This distance can be translated into a measurement of the sea level along the T/P ground track given accurate knowledge of the location of the satellite in earth orbit. Critical to the success of the mission are corrections for the variable propagation delay caused by the intervening atmosphere. The correction for columnar water vapor are measured by the TOPEX Microwave Radiometer
Close Active Range(0.01” to 2.0”) Resolution ±0.0004 inches Linearity±0.75% (Deviation-from-straight-line) Power +12 VDC (2A) Operating TemperatureProbes: Up to 2000° FRF Module: 0 to 185° FTeflon Coaxial Cable: 350° FMineral Insulated Coaxial Cable: 1500° F Humidity0 to 100% non-condensing Contaminant ImmunityImmune to dust, dirt, oil, and other industrial debris EMIImmune to EMI Major Specifications
Typical Long Range Active Min-Max Speed: 3 to 309 mph Accuracy: 1% Power Output: 5 mW Power Required: 10 to 26 VDC, 3 W Size/Weight: 4 × 4 × 8 inches/2 lbs. Typical Passive Sensors Frequencies: 1 to 100 GHz Measurement Range: 0 Km to 350 Km Absolute Accuracy: 0.5 K, 0.4 K (RMS) over 10 minutes/ea Resolution: 0.3 Km min Antenna Beam Width: 10 deg. (FWHM) Beam Efficiency: 98% min Cross Polarization: 0.1% max Sidelobe level: -40 dBi max Polarization: V & H (23.8 GHz only V) IF Bandwidth: 200 MHz
Close Range Offered by only one company Work only with vibrating objects Long Range Possible health problems related to electromagnetic radiation (not proven yet) Wet surfaces cause problems because of the dielectric constant The geometric shape of the reflective surface may cause error (can be limited by signal processing) Active Sensor Limitations
Passive Sensor Limitations • Physical factors such as the dielectric constant of the surface materials which also depends strongly on the moisture content • Geometric factors such as surface roughness, slopes, orientation of the objects relative to the radar beam direction • The types of landcover (soil, vegetation or man-made objects) • Microwave frequency, polarisation and incident angle all aaffect the output
Active Close Range Contact Radatec Determine the range needed Optional features Opto-isolated digital inputs Relay outputs Data memory Clock Active Long Range Determine the range Operating frequency Temperature requirements Power consumption Signal processing elements Choosing a Sensor
Where to Buy • Active Close Range – Radatec • www.radatec.com • Active Long Range • Search www.globalspec.com for proximity or velocity microwave sensors