Download
1 / 19
190 likes | 219 Views
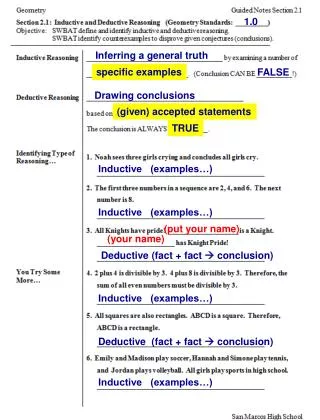
Microrovers: Current and Past Examples and Conclusions. Microrover Space Horizons Workshop Brown University Feb. 16, 2012 Bruce Betts, Ph.D. The Planetary Society. Microrovers. What is a microrover? No precise definition currently.

E N D
Microrovers: Current and Past Examples and Conclusions Microrover Space Horizons Workshop Brown University Feb. 16, 2012 Bruce Betts, Ph.D. The Planetary Society
Microrovers • What is a microrover? • No precise definition currently. • One example: 1 to roughly 10 kg; MUSES-CN to Sojourner • Lots of examples in design and Earth use, only Sojourner in flight • We’ll look at microrovers: • Coolness • Catalog • Examples • Uses • Conclusions
Why are microrovers cool? • Low cost, mass, volume imply: • Several can be piggybacked on missions • Increase capability, decrease risk for low cost • Power advantage: higher power to mass ratio for smaller rovers • Can use in riskier ways if desired, • Mitigate risk by flying multiple • Easy to deploy • Microrovers lead to new paradigms
Background: Cornell/TPS Microrovers Project • Much of what is presented here came out of a Cornell/Planetary Society project (NASA Steckler Grant) to study Microrovers for use with astronauts. • Though focus with astronauts, many products/conclusions remain useful for robotic only • The Planetary Society • Bruce Betts • Louis Friedman • Doug Stetson • Interns • Cornell University • Jim Bell (later ASU) • Mason Peck • Joseph Shoer • Yervant Terzian • S/C Engineering class • Stellar Exploration • Tomas Svitek and associates • Independent • Tom Jones • TM at JPL • Brian Wilcox
Microrover Catalog • Created online microrover catalog • What has been done for space and Earth on microrovers. • Want to help new groups: • Not reinvent “the wheel” • Stimulate design thoughts • One stop info on over 100 Terrestrial and Planetary Rovers (up to 100 kg for comparison) • Tells us what we missed
Online Microrover Catalog http://planetary.org/microrovers
Examples of current/recent microrovers • Only “microrover” flown: Sojourner (11.5 kg) on Mars Pathfinder. • MUSES-CN (1 kg) was also developed for flight by JPL
Example prototypes for space JPL Sample Return Rover ESA Nanokhod (1.5 kg) Carleton U./CSA Kapvik (30 kg) Neptec/CSA Juno prototype
Earth uses examples (note design variety) Inuktun VGTV (commercial inspection) 6 kg Hirose/Fukushima Titan IX (defense/commercial) prototype mine removal iRobot SUGV 11 kg defense Recon robotics Recon scout 0.5 kg, defense
How can we use microrovers? • Reconnaissance: • scout possible traverses (e.g., for large rover, or for astronauts) • even more efficient if use multiple • several microrovers quickly explore area compared to one large rover • Science: wide range possible from imaging to contact science depending on payload. • High risk exploration, • e.g., steep slopes, lava tubes
How can we use microrovers (2) • Increasing Astronaut/Big Rover Safety • Enable focusing EVAs/Big rover traverses on optimized tasks • Facilities Inspection • Communications relays for astronauts working “over the next hill”
How can we use microrovers (3) • Increase Public Excitement/Involvement • Will be “fun” and engaging for the public • Enable additional perspectives imaging spacecraft, facilities, and astronauts (family portrait) • Increase Student Involvement • Like CubeSat analogy, standardized microrover conducive to university/student run projects • Can have limited student/public teleoperation
Design Studies • We did some basic design studies • One semester long Cornell engineering design class on this topic (~50 students) • Provided input to follow-on professional study (Stellar/TPS/Cornell), which distilled and added to student studies, and developed general and specific conclusions
Some General Conclusions • Microrovers 1 - 11 kg offer unique benefits and risks, significantly different from larger rovers • Paradigm shift: not a single rover that does it all, allows new concept of operations • A group of microrovers may accomplish more, with fewer issues of reliability and lower cost than a single, large rover • Low mass and easily stowed, microrovers adaptable to flexible, everyday use compared to larger
Specific Conclusions • Power/insulation solutions exist to allow a microrover to survive the lunar night; • Mechanically matching an astronaut's speed should not be a driving requirement for the rover's mobility subsystem. Instead: • Virtual proximity through network, and • Recon, science, inspection prior to or in place of astronaut EVA • Microrovers can provide GPS-like position knowledge
Specific Conclusions (2) • Microrovers could have same core design, but portions including payload could reconfigured, ideally in a plug-and-play fashion. • Working collaboratively as a network allows tasks to be shared among many nodes, including communications relay. • Teleoperation, autonomous, or both. Ideally, both – at least limited autonomy.
Web and Email • http://planetary.org/microrovers (Microrover catalog and additional info/papers from TPS/Cornell study) • Contact: bruce.betts@planetary.org Let me know what is missing from catalog.