Download
1 / 38
390 likes | 575 Views
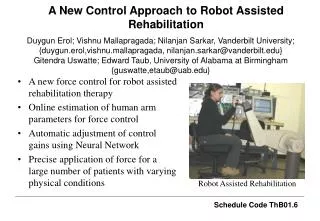
Use of Hybrid System Modeling Technique fo r Robot- Assisted Rehabilitation Systems. Duygun Erol. Yeditepe University Electrical & Electronics Engineering Department Istanbul, TURKEY. 1. Motivation.

E N D
Use of Hybrid System Modeling Technique for Robot-Assisted Rehabilitation Systems Duygun Erol Yeditepe University Electrical & Electronics EngineeringDepartment Istanbul, TURKEY 1
Motivation • Stroke is a highly prevalent condition, especially among the elderly, that results in high costs to the individual and the society • Every year, a large number of people have a stroke in all over the world 2
Motivation • Stroke rehabilitation points towards the intense and repetitive movement assisted therapy that has shown significant beneficial impact on a large segment of the patients • The availability of such training techniques, however, are limited by • the amount of costly therapist’s time they involve • the ability of the therapist to provide controlled, quantifiable and repeatable assistance • Robot-assisted rehabilitation that can • provide quantifiable and repeatable assistance that ensure consistency during the rehabilitation • likely to be cost-efficient 3
MIT Manus Carnegie Mellon Hand Device MIME GENTLE/s ADLER Rutgers Master II-ND ARM Guide HWARD CyberGrasp Robot-Assisted Rehabilitation Systems 4
Limitations • Twoimportant issues that the current robot-assistedrehabilitation systems do not address • First, they are limited by their inability to simultaneously assist both arm and hand movements • Second, none of these robot-assisted rehabilitationsystems can comprehensively alter the task parameters based on patient’s feedback to impart effective therapy during the execution of the task in an automated manner 5
Scope of the Research Rehabilitation Therapy Approaches Task-Oriented Therapy Movement Assisted Therapy Robot-Assisted Rehabilitation Systems for both Arm and Hand Movement (?) Robot-Assisted Rehabilitation Systems for Hand Movement Robot-Assisted Rehabilitation Systems for Arm Movement • The objective of this work is to develop an intelligent control architecture for robot-assisted rehabilitation systems that can provide assistance to both the arm and hand in a coordinated manner to allow stroke patients to undergo task-oriented active training therapy • Additionally a human intention recognition system is augmented inside the control architecture to dynamically modify the rehabilitation task based on the patient’s verbal feedback 6
Intelligent Control Architecture • Hybrid system theory provides mathematical tools that accommodate both continous and discrete system in a unified manner • Hybrid system model provides flexible and extendible environment • Hybrid system allows analysis of properties such as stability, reachability • Advantage of using hybrid system model is taken to model the robot-assisted rehabilitation system 7
Task Design(Drinking from a Bottle) • i) reach towards the bottle while opening the hand, ii) reach the bottle, iii) close the hand to grasp the bottle, iv) move the bottle towards the mouth, v) drink from a bottle using a straw, vi) place the bottle back on the table, vii) open the hand to leave the bottle back on the table and viii) go back to starting position 19
Design Details of theIntelligent Controller (Theory) • The discrete event system (DES) plant model (plant and interface) is a nondeterministic finite automaton • The DES controller (high-level controller) is modeled as a discrete-event system (DES) deterministic finite automaton 20
Design Details of the Intelligent Controller • Each region in the state space of the plant bounded by the hypersurface is associated with a state of the DES plant as: 21
Design Details of the Intelligent Controller (cont’) • The plant symbols in are found using: 22
Design Details of the Intelligent Controller (cont’) • The control states in are found using: 23
Design Details of the Intelligent Controller (cont’) • The control symbols in are found using: 24
Experiments • First the validation of the human intention recognition system is summarized • Then the results of the experiments to demonstrate the efficacy of the proposed control architecture are provided • The Matlab/Simulink/Stateflow software is used to implement the proposed high-level controller 26
Results(Evaluation of the Proposed Intelligent Control Architecture ) Desired Motion Trajectory 28
Results (cont’) 30 Desired Trajectory for the DFB task when an Unplanned Event Happened
Results (cont’) 31 Subject’s Actual Trajectories and Hand Configuration of the Subject for the Experiment
Discussions and Conclusion • A new intelligent control architecture is designed that can • supervise the arm and the hand assistive devices to produce necessary coordinated motion to complete a given ADL task, • monitor the progress and the safety of the ADL task such that necessary dynamic modifications of the task execution can be made (if needed) to complete the given task in a safe manner, • incorporate patient’s feedback in order to make the necessary modifications to impart effective therapy during the execution of the task in an automated manner 33
Discussions and Conclusion (cont’) • The proposed intelligent control architecture exploits hybrid system modeling techniques to accommodate both continuous and discrete systems in a unified manner • Hybrid system modeling technique is particularly useful in this context since it allows a systematic interface between the low-level assistive controllers and the high-level decision-making controller • The hybrid system modeling technique provides flexibility in interfacing low-level controllers without extensive redesign cost 34
Discussions and Conclusion (cont’) • Hybrid system modelling is mathematically rigorous and provides systematic design tools that are not limited by the number of states or events • New safety features as well as new task requirements can be incrementally added to the system by designing new events either by adding new sensors or by further analyzing the current sensory information and by adding new decision rules in the high-level controller • The patient’s feedback is easily integrated inside the proposed intelligent control architecture 35
Contributions of Hybrid System Modelling Techniquesto Rehabilitation Robotics • The proposed hybrid system based control architecture provides a systematic procedure to effect changes such that the task execution could be automated • Instead of preprogramming numerous static trees based on if-then-else rules, it provides a dynamic mechanism of generating events that leads to necessary high-level decisions • A hybrid system based control mechanism could be useful in rehabilitation context in terms of coordinating decision making and assisting, monitoring safety, and managing and modifying code for automation • To our knowledge, such a hybrid system based control mechanism has not been explored in rehabilitation robotics 36
Future Work • Demonstrate the efficacy of the proposed intelligent control architecture with the stroke patients • Search for other hybrid system modelling techniques to develop a global control architecture • The efficient ways of human intention recognition systemsareplanned to be investigated that can recognize unclear words for stroke survivors who have aphasia 37
THANK YOU 38