Download
1 / 2
40 likes | 162 Views
A New Control Approach to Robot Assisted Rehabilitation. Duygun Erol; Vishnu Mallapragada; Nilanjan Sarkar, Vanderbilt University; {duygun.erol,vishnu.mallapragada, nilanjan.sarkar@vanderbilt.edu} Gitendra Uswatte; Edward Taub, University of Alabama at Birmingham {guswatte,etaub@uab.edu}.

E N D
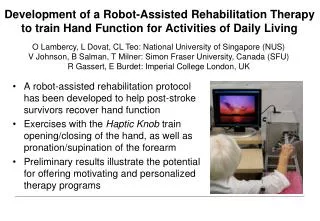
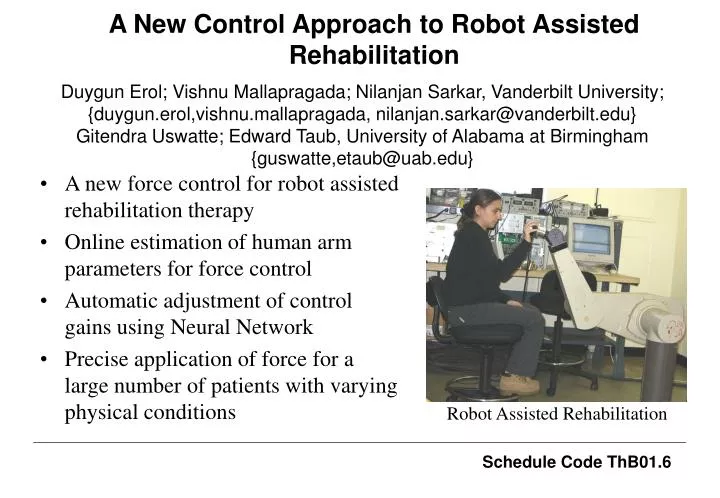
A New Control Approach to Robot Assisted Rehabilitation Duygun Erol;Vishnu Mallapragada; Nilanjan Sarkar, Vanderbilt University; {duygun.erol,vishnu.mallapragada, nilanjan.sarkar@vanderbilt.edu}Gitendra Uswatte; Edward Taub, University of Alabama at Birmingham{guswatte,etaub@uab.edu} • A new force control for robot assisted rehabilitation therapy • Online estimation of human arm parameters for force control • Automatic adjustment of control gains using Neural Network • Precise application of force for a large number of patients with varying physical conditions Robot Assisted Rehabilitation Schedule Code ThB01.6
A New Control Approach for Robot Assisted Rehabilitation Duygun Erol, Electrical Engineering and Computer Science, Vanderbilt UniversityVishnu Mallapragada, Mechanical Engineering, Vanderbilt University; Nilanjan Sarkar, Mechanical Engineering, Vanderbilt University; Gitendra Uswatte, Psychology Department, University of Alabama at Birmingham; Edward Taub, Psychology Department, University of Alabama at Birmingham • A new control framework is presented which provides an optimal time-varying assistive force to stroke patients. • An artificial neural network (ANN)-based PI-gain scheduling direct force controller is proposed which is capable of determining the characteristics of the interacting environment and automatically tuning the control gains of the controller to generate the desired assistance for a wide range of people. Robot assisted Rehabilitation ThB01.6