Download
1 / 12
130 likes | 366 Views
Theory and Practice of Projective Rectification. 2013-05-29 Ko Dae -Won. Theory and Practice of Projective Rectification. 1. Preliminaries. The following = det (A)I where I is the identity matrix. In particular, if A is an invertible matrix, then .

E N D
Theory and Practice of Projective Rectification 2013-05-29 KoDae-Won
Theory and Practice of Projective Rectification 1. Preliminaries The following = det(A)I where I is the identity matrix. In particular, if A is an invertible matrix, then .
Theory and Practice of Projective Rectification 1. Preliminaries Given a vector it is convenient to introduce the skew-symmetric matrix
Theory and Practice of Projective Rectification 1. Preliminaries The matrix is closely related to the cross-product of vectors in that for any vectors and t, we have and . Proposition 1. For any 3 x 3 matrix M and vector t,
Theory and Practice of Projective Rectification 1. Preliminaries If A is a 3 x 3 non-singular matrix representing a projective transformation of then is the corresponding line map. In other words, if and line on a line L, then and : in symbols )). This formula is derived from Proposition 1.
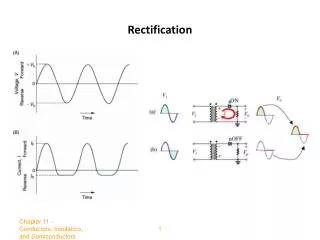
Theory and Practice of Projective Rectification 2. Property of the fundamental matrix
Theory and Practice of Projective Rectification 2. Property of the fundamental matrix According to Proposition2, the matrix F determines the epipoles in both images. Furthermore, F provides the map between points in one image and epipolar lines in the other image.
Theory and Practice of Projective Rectification 3. Mapping the Epipole to Infinity Goal: Finding a projective transformation H of an image mapping an epipole to a point at infinity. In fact, if epipolar lines are to be transformed to lines parrallel with x axis, then the epipole should be mapped to the infinite point If inappropriate H is chosen, severe projective distortion of the image can take place.
Theory and Practice of Projective Rectification 3. Mapping the Epipole to Infinity In order that the resampled image should look somewhat like the original image, we may put closer Restrictions on the choice of H. One condition that leads to good results is to insist that The transformation H should act as far as possible as a Rigid transformation in the neighborhood of a given selected point of the image.
Theory and Practice of Projective Rectification 3. Mapping the Epipole to Infinity By this is meant that to first order neighborhood of may undergo rotation and translation only. An appropriate choice of point may be the centre of the image.
Theory and Practice of Projective Rectification 3. Mapping the Epipole to Infinity
Theory and Practice of Projective Rectification 3. Mapping the Epipole to Infinity