Download
1 / 9
90 likes | 310 Views
Method: Elastic Graph Matching (EGM). A labeled graph G representing Hand consists of : Nodes with a local image description, positions Edges with a distance vector General Hand Knowledge Two constraints Similarity functions for the nodes and a cost function for the edges.

E N D
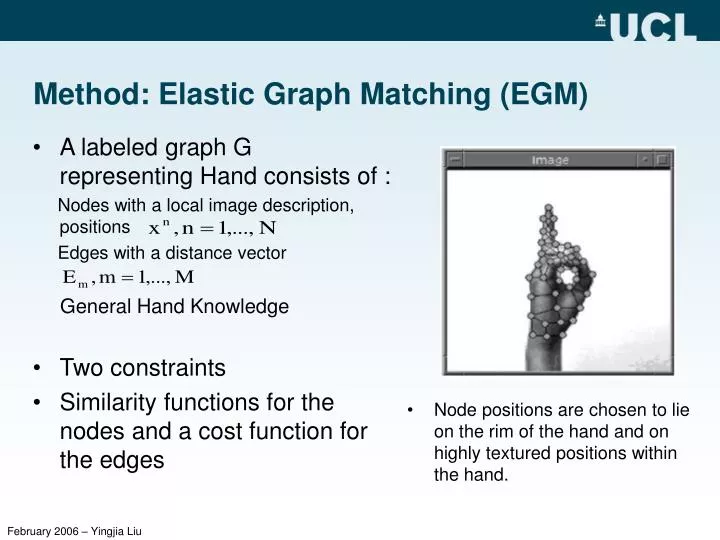
Method: Elastic Graph Matching (EGM) • A labeled graph G representing Hand consists of : Nodes with a local image description, positions Edges with a distance vector General Hand Knowledge • Two constraints • Similarity functions for the nodes and a cost function for the edges • Node positions are chosen to lie on the rim of the hand and on highly textured positions within the hand.
Jets and Similarity function • Jet is the result of convolutions with several filters of different wave-vector k form a local image description. • Sabs only uses the magnitudes of the complex filter responses, Spha also considers their phases. Both functions yield similarity values between zero and one.
Bunch-graphs of hand postures • The idea behind the bunch-graph concept is to express the variability in the jets of corresponding points in several images of an object by labeling a node with a collection of jets rather than only a single jet. • All graphs have 35 nodes and 70 edges. • The node information attached to each node of the bunch-graph is a bunch-jet B defined as the set of the six jets of that node n: • B = {J (1),…, J (6)}
Matching of a Bunch-graph • The key role in EGM is played by a function evaluating the graph similarity between an image graph and the GHK of identical view.
Compensate Variations • During the matching process the model graph may be distorted. • Big distortions shall be punished by a topological cost term. • Cost for a single edge • The average for all individual edges:
Matching Process • The matching process operates in three steps: • Coarse positioning of the graph: • Rescaling of the graph: • Local diffusion of single nodes:
Tests and Results • Our gallery consists of 10 hand postures performed by 24 persons against three types of backgrounds: uniform light, uniform dark, and complex.
References [1] L. Wiskott, J.-M. Fellous, N. Kru¨ger, C. von der Malsburg, Face recognition and gender determination, Proc. Int. Workshop Autom. Face Gesture Recogn., Zu¨rich, Switzerland June (1995) 92–97. [2] L. Wiskott, Labeled Graphs and Dynamic Link Matching for Face Recognition and Scene Analysis, PhD Thesis, vol. 53 of Reihe Physik, Verlag Harri Deutsch, Thun, Frankfurt a. Main, Germany, 1995.