Download
1 / 26
260 likes | 285 Views
Learn how to minimize energy consumption in CMOS circuits through innovative design strategies and linear programming methods. Explore the latest research findings and techniques in the field of dynamic power optimization.

E N D
Minimum Dynamic Power CMOS Circuits Vishwani D. Agrawal Rutgers University, Dept. of ECE Piscataway, NJ 08854 http://cm.bell-labs.com/cm/cs/who/va Collaborators: M. L. Bushnell and T. Raja, Rutgers University (Support from NSF) Minimum Dynamic Power CMOS
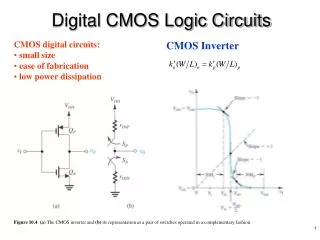
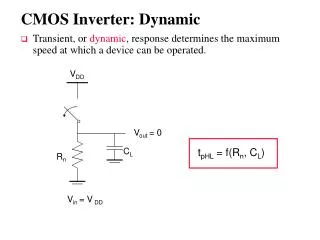
Power in a CMOS Gate VDD = 5V IDD Ground Minimum Dynamic Power CMOS
Problem Statement • Design a digital circuit for minimum transient energy consumption by eliminating hazards Ref: Agrawal (`97), Agrawal et al. (`99) Minimum Dynamic Power CMOS
Theorem 1 • For correct operation with minimum energy consumption, a Boolean gate must produce no more than one event per transition Ref: Agrawal, et al., Proc. VLSI Design’99 Minimum Dynamic Power CMOS
Theorem 2 • Given that events occur at the input of a gate (inertial delay = d ) at times t1 < . . . < tn , the number of events at the gate output cannot exceed tn – t1 -------- d min ( n , 1 + ) tn - t1 + d time t1 t2 t3 tn tn + d Minimum Dynamic Power CMOS
Minimum Transient Design • Minimum transient energy condition for a Boolean gate: | ti - tj | < d Where ti and tj are arrival times of input events and d is the inertial delay of gate Minimum Dynamic Power CMOS
Linear Program (LP) • Variables: gate and buffer delays • Objective: minimize number of buffers • Subject to: overall circuit delay • Subject to: minimum transient condition for multi-input gates • AMPL, MINOS 5.5 (Fourer, Gay and Kernighan) Minimum Dynamic Power CMOS
Limitations of This LP • Constraints are written by path enumeration. • Since number of paths in a circuit is exponential in circuit size, the formulation is infeasible for large circuits. • Example: c880 has 6.96M constraints. Minimum Dynamic Power CMOS
A New LP Model • Introduce two new variables per gate output: • ti Earliest time of signal transition at gate i. • Ti Latest time of signal transition at gate i. t1, T1 ti, Ti . . . tn, Tn Ref: Raja et al. (`03) Minimum Dynamic Power CMOS
New Linear Program • Gate variables d4 . . . d12 • Buffer Variables d15 . . . d29 • Corresponding window variables t4 . . . t29 and T4 . . . T29. Minimum Dynamic Power CMOS
Multiple-Input Gate Constraints For Gate 7: T7> T5 + d7; t7 < t5 + d7; d7> T7 - t7; T7> T6 + d7; t7 < t6 + d7; Input windows: Output windows: t5+d7 T5+d7 t5 T5 t6+d7 T6+d7 t6 T6 t7 T7 Minimum Dynamic Power CMOS
Single-Input Gate Constraints Buffer 19: T16 + d19 = T19 ; t16 + d19 = t19 ; Minimum Dynamic Power CMOS
Overall Delay Constraints T11<maxdelay T12<maxdelay Minimum Dynamic Power CMOS
Why New Model is Superior? • Path constraints from old model: 2 × 2 × … 2 = 2n paths between an I/O pair • For new model, a single constraint per PO controls I/O delay. • For new model, number of minimum energy constraints for each gate depends on gate inputs. Minimum Dynamic Power CMOS
Comparison of Constraints 6.96x106 Number of constraints 3,611 c880 Number of gates in circuit Minimum Dynamic Power CMOS
Results: 1-Bit Adder Minimum Dynamic Power CMOS
Estimation of Power • Circuit is simulated by an event-driven simulator for both optimized and un-optimized gate delays. • All transitions at a gate are counted as Events[gate]. • Power consumed Events[gate] x # of fanouts. • Ref: “Effects of delay model on peak power estimation of VLSI circuits,” Hsiao, et al. (ICCAD`97). Minimum Dynamic Power CMOS
Original 1-Bit Adder Color codes for number of transitions Minimum Dynamic Power CMOS
Optimized 1-Bit Adder Color codes for number of transitions Minimum Dynamic Power CMOS
Benchmark Circuits Circuit C432 C880 C6288 c7552 Maxdel. (gates) 17 34 24 48 47 94 43 86 Normalized Power No. of Buffers 95 66 62 34 294 120 366 111 Average 0.72 0.62 0.68 0.68 0.40 0.36 0.28* 0.26* Peak 0.67 0.60 0.54 0.52 0.36 0.34 0.24* 0.22* * Corrected data Minimum Dynamic Power CMOS
Results: 4-Bit ALU Power Savings : Peak = 33 %, Average = 21 % Minimum Dynamic Power CMOS
Physical Design Gate l/w Gate l/w Gate l/w Gate l/w Gate delay modeled as a linear function of gate size, total load capacitance, and fanout gate sizes (Berkelaar and Jacobs, 1996). Layout circuit with some nominal gate sizes. Enter extracted routing delays in LP as constants and solve for gate delays. Change gate sizes as determined from a linear system of equations. Iterate if routing delays change. Minimum Dynamic Power CMOS
Power Dissipation of ALU4 1 micron CMOS, 57 gates, 14 PI, 8 PO 100 random vectors simulated in Spice 7 6 5 Original ALU delay ~ 3.5ns 4 Energy in nanojoules 3 Minimum energy ALU delay ~ 10ns 2 1 0 1.5 0.0 0.5 2.0 1.0 microseconds Minimum Dynamic Power CMOS
ALU: Original and Optimized Minimum Dynamic Power CMOS
References • R. Fourer, D. M. Gay and B. W. Kernighan, AMPL: A Modeling Language for Mathematical Programming, South San Francisco: The Scientific Press, 1993. • M. Berkelaar and E. Jacobs, “Using Gate Sizing to Reduce Glitch Power,” Proc. ProRISC Workshop, Mierlo, The Netherlands, Nov. 1996, pp. 183-188. • V. D. Agrawal, “Low Power Design by Hazard Filtering,” Proc. 10th Int’l Conf. VLSI Design, Jan. 1997, pp. 193-197. • M. Hsiao, E. M. Rudnick and J. H. Patel, “Effects of Delay Model in Peak Power Estimation of VLSI Circuits,” Proc. ICCAD, Nov. 1997, pp. 45-51. • V. D. Agrawal, M. L. Bushnell, G. Parthasarathy and R. Ramadoss, “Digital Circuit Design for Minimum Transient Energy and Linear Programming Method,” Proc. 12th Int’l Conf. VLSI Design, Jan. 1999, pp. 434-439. • V. D. Agrawal, “Low Power Circuits Through Hazard Pulse Suppression,” US Patent 5,983,007, Nov. 9, 1999. • T. Raja, V. D. Agrawal and M. L. Bushnell, “Minimum Dynamic Power CMOS Circuit Design by a Reduced Constraint Set Linear Program,” Proc. 16th Int’l Conf. VLSI Design, Jan. 2003. Minimum Dynamic Power CMOS
Conclusion • Obtained an LP constraint-set that is linear in the size of the circuit. LP solution: • Eliminates glitches at all gate outputs, • Holds I/O delay within specification, and • Combines path-balancing and hazard-filtering to minimize the number of delay buffers. • New LP produces results exactly identical to old LP requiring exponential constraint-set. • Results show peak power reduction up to 78% and average power savings up to 74%. Minimum Dynamic Power CMOS